I set up Unity for Meta Quest virtual reality (VR) development. I learned how to:
- Set up a Unity 3D project that runs on Meta Quest VR headsets
- Add VR interactions to a Unity scene
- Preview my app on a Meta Quest 3
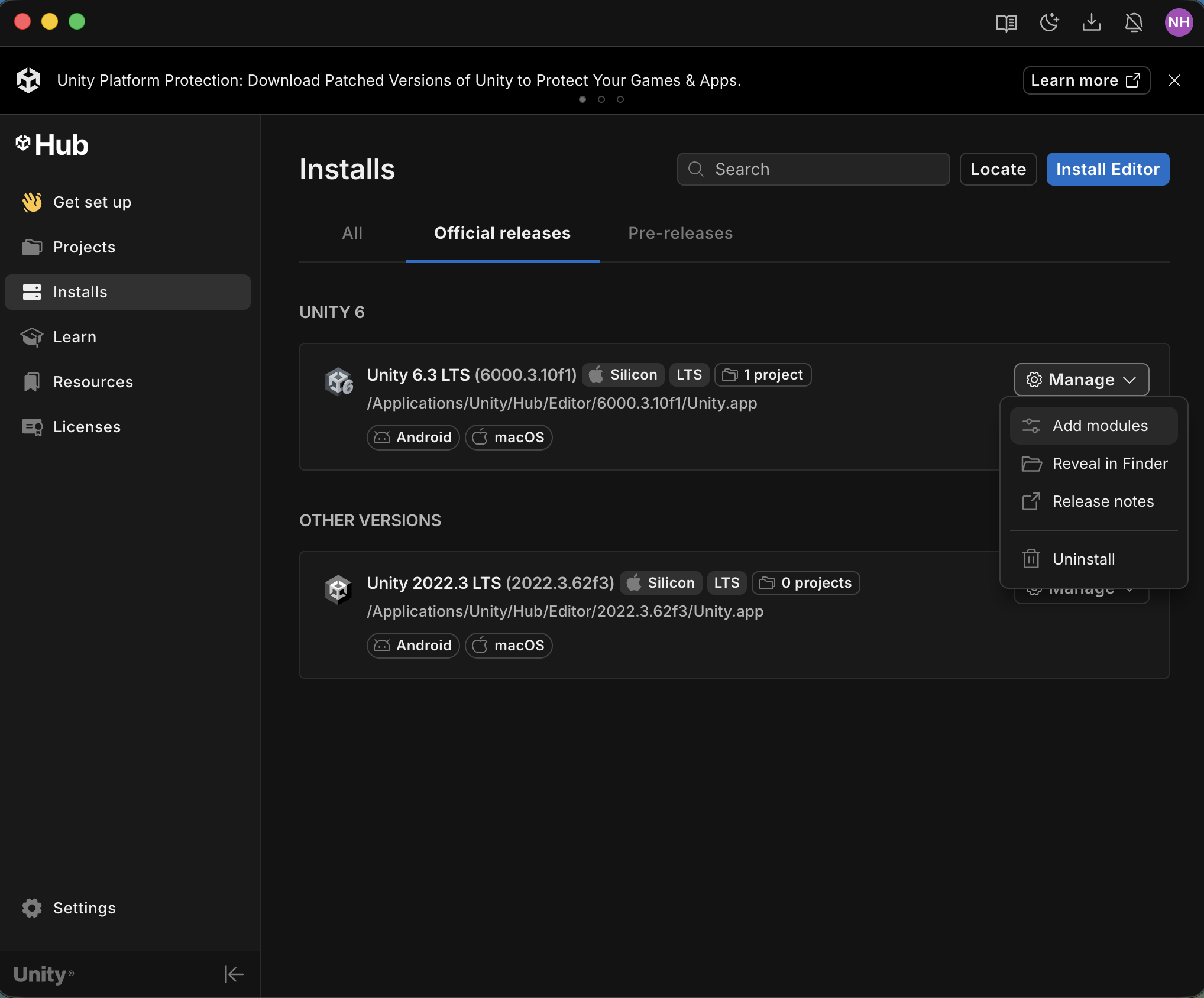
I installed Unity Hub
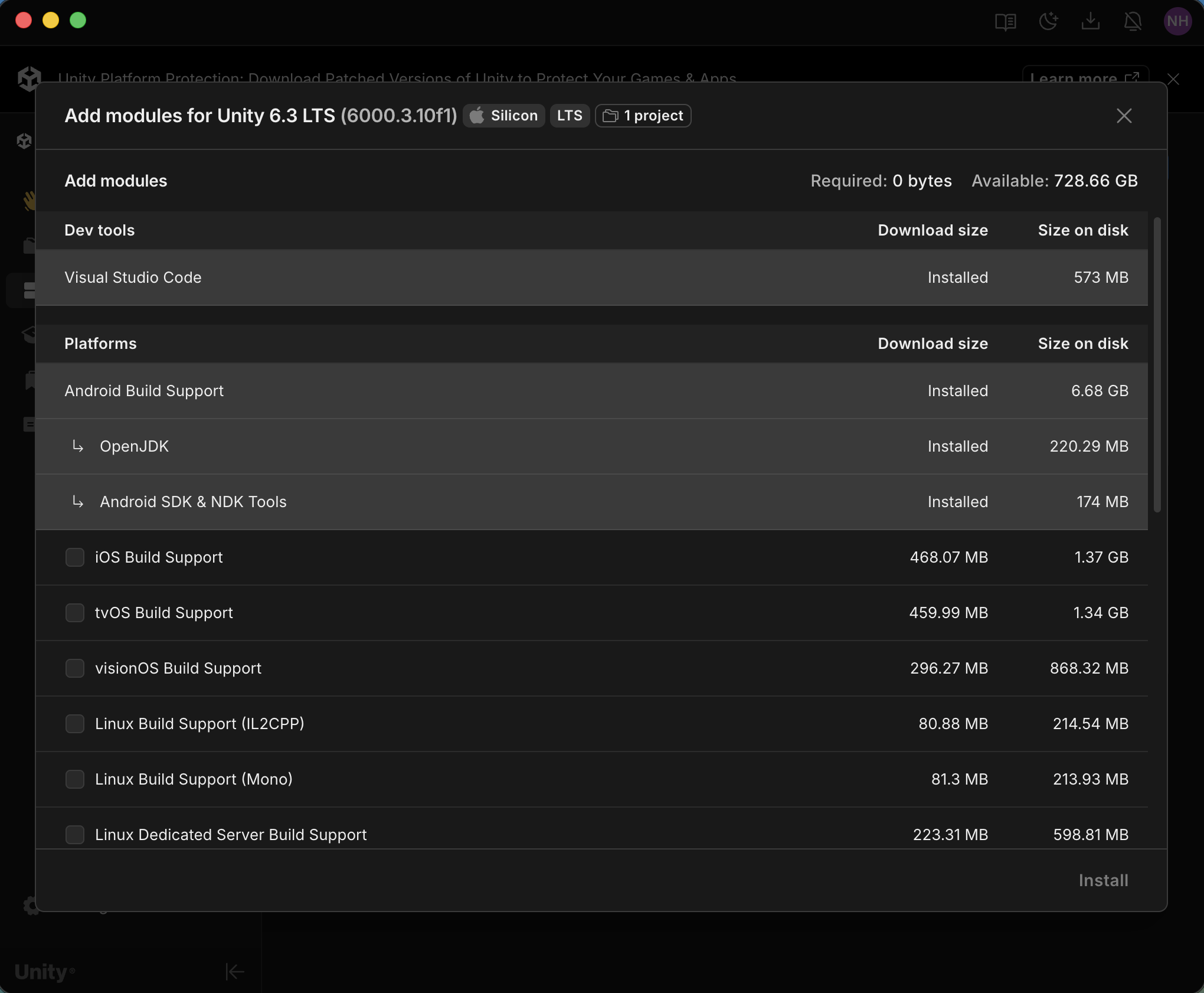
On the Add module screen, I selected the Android Build Support items in the Platforms section.
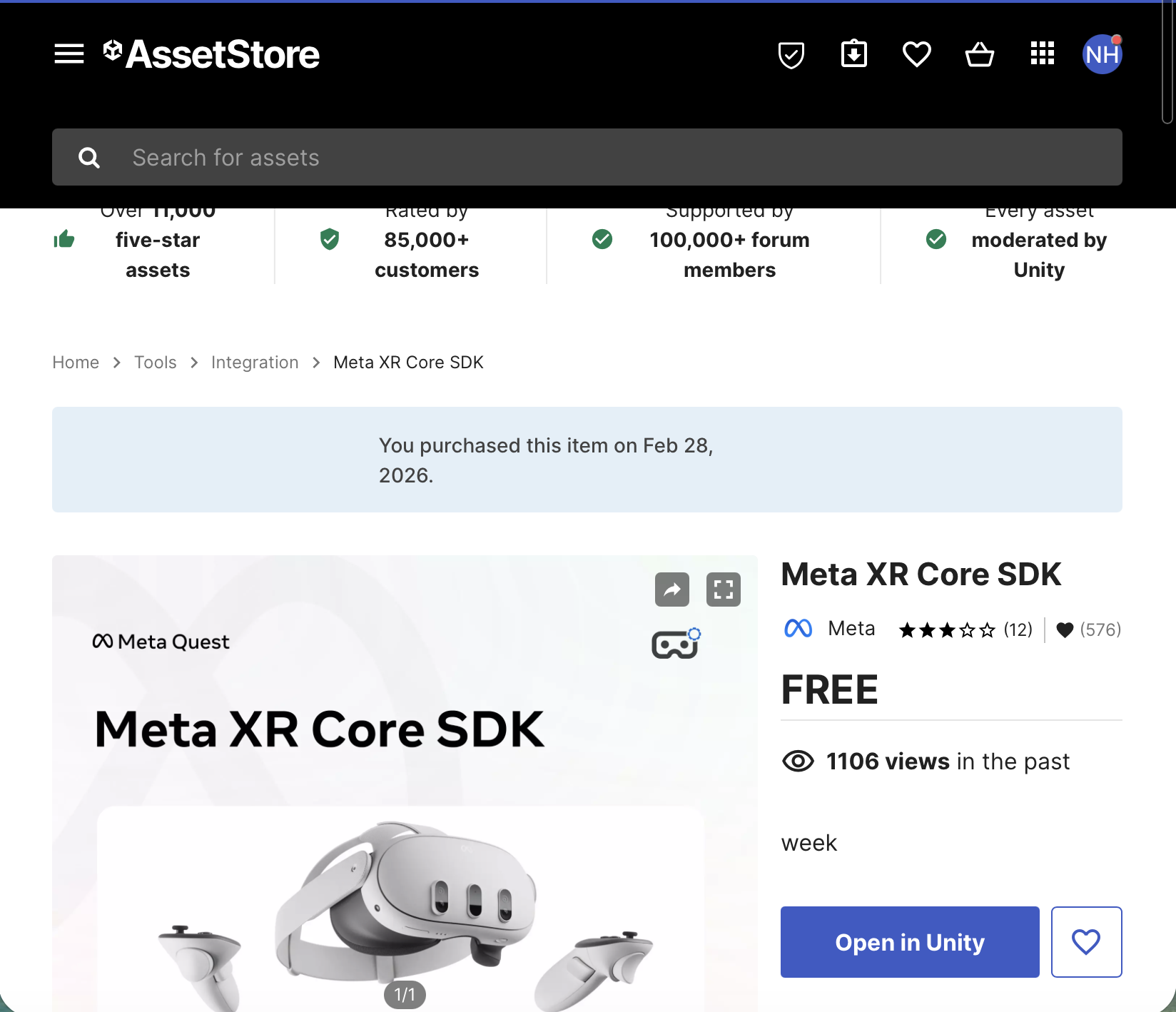
I opened the Meta XR Core SDK in Unity from the Asset Store
I selected Projects in the left navigation bar, and clicked New project.
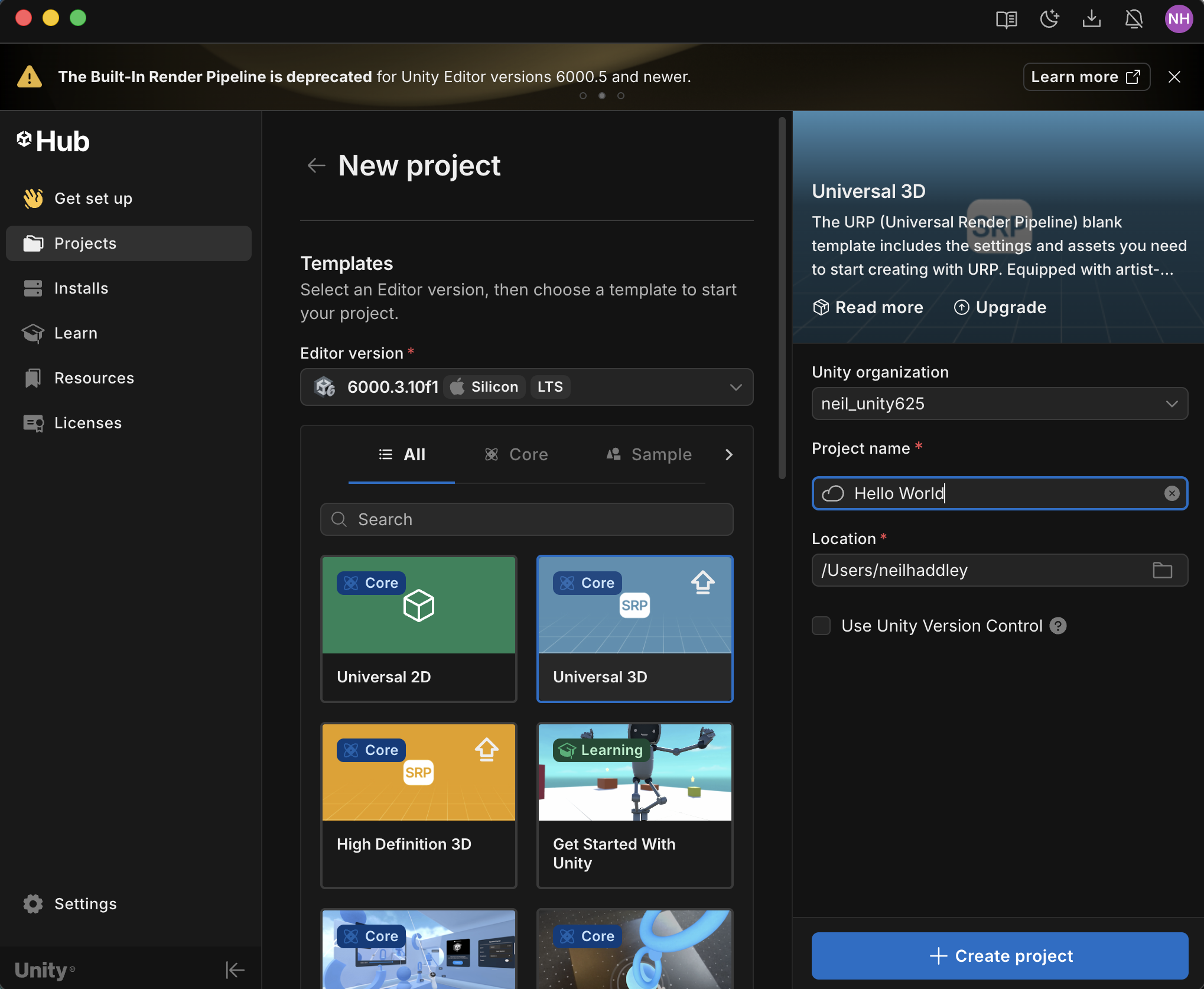
I selected the Universal 3D template
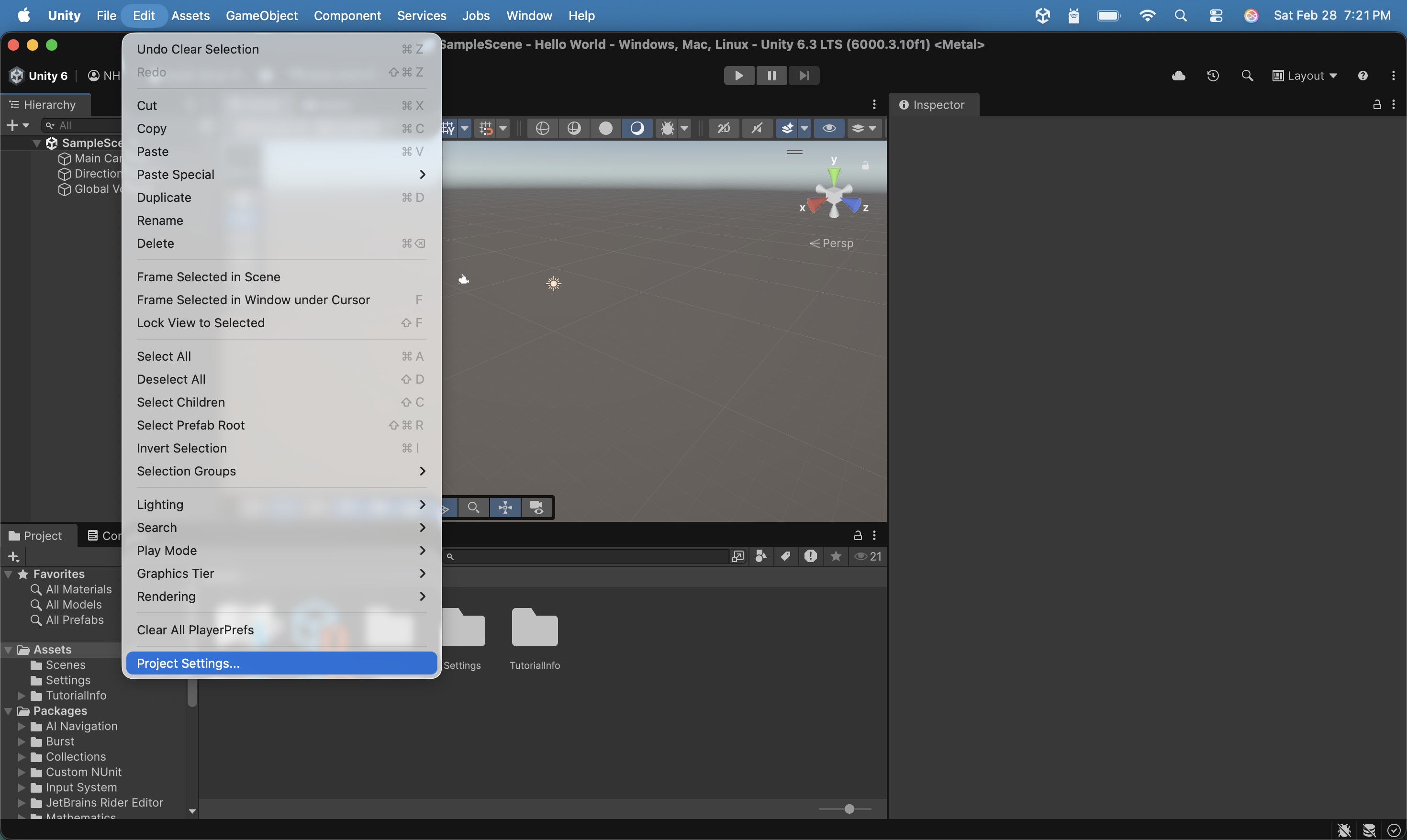
I opened the project and selected Edit > Project Settings
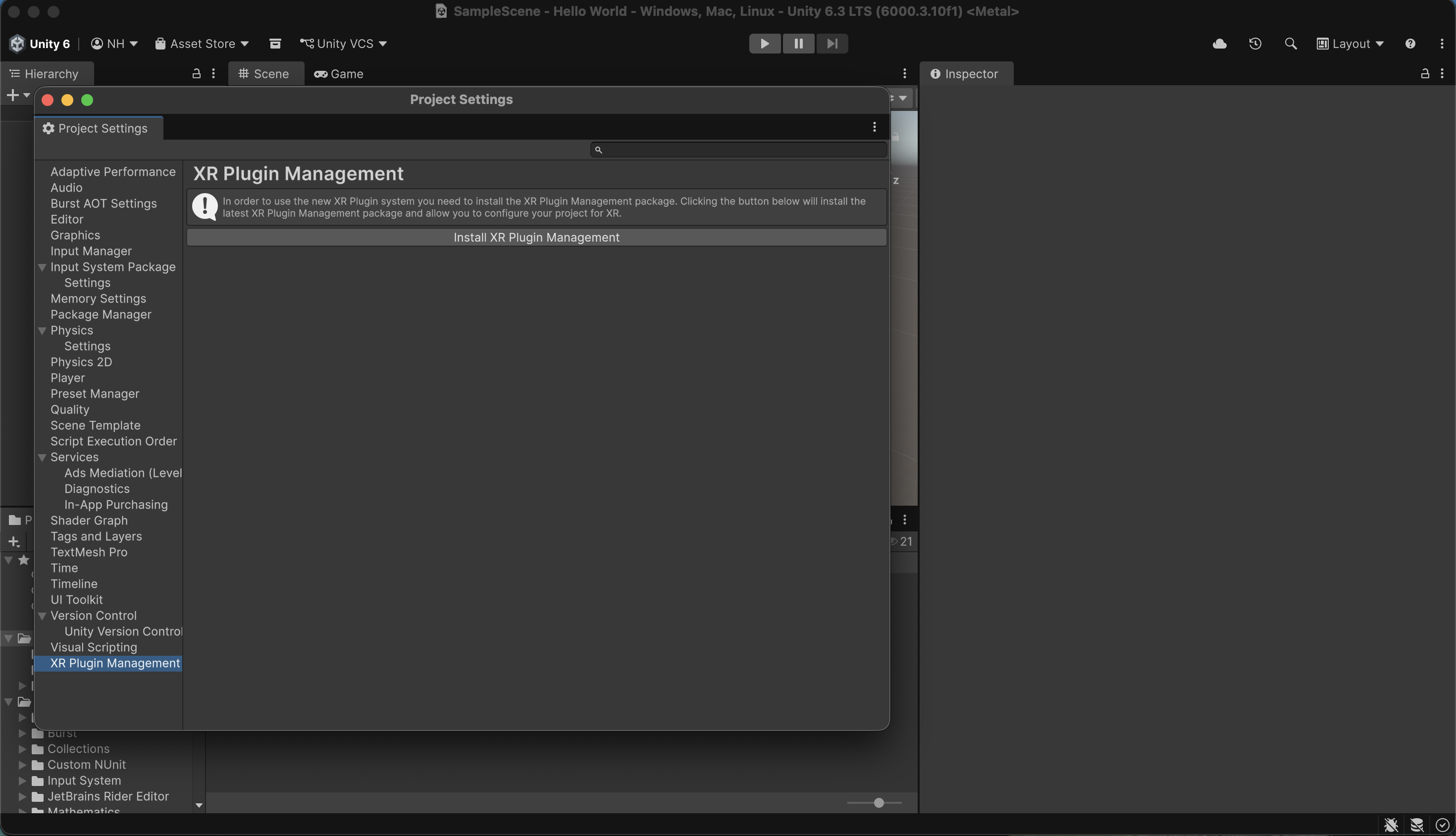
I selected the XR Plug-in Management menu item on the left of the Project Settings window.
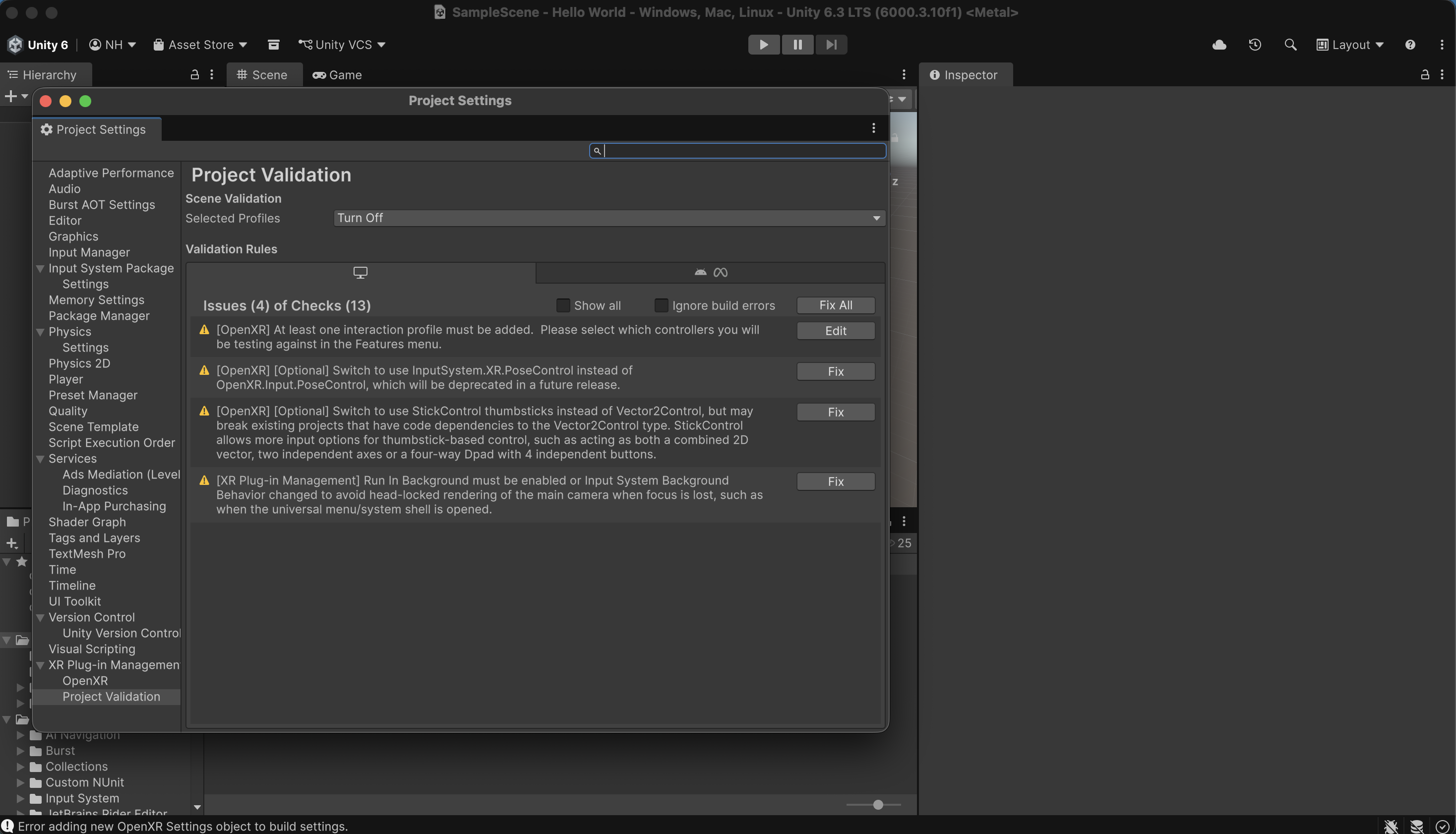
I clicked Fix All
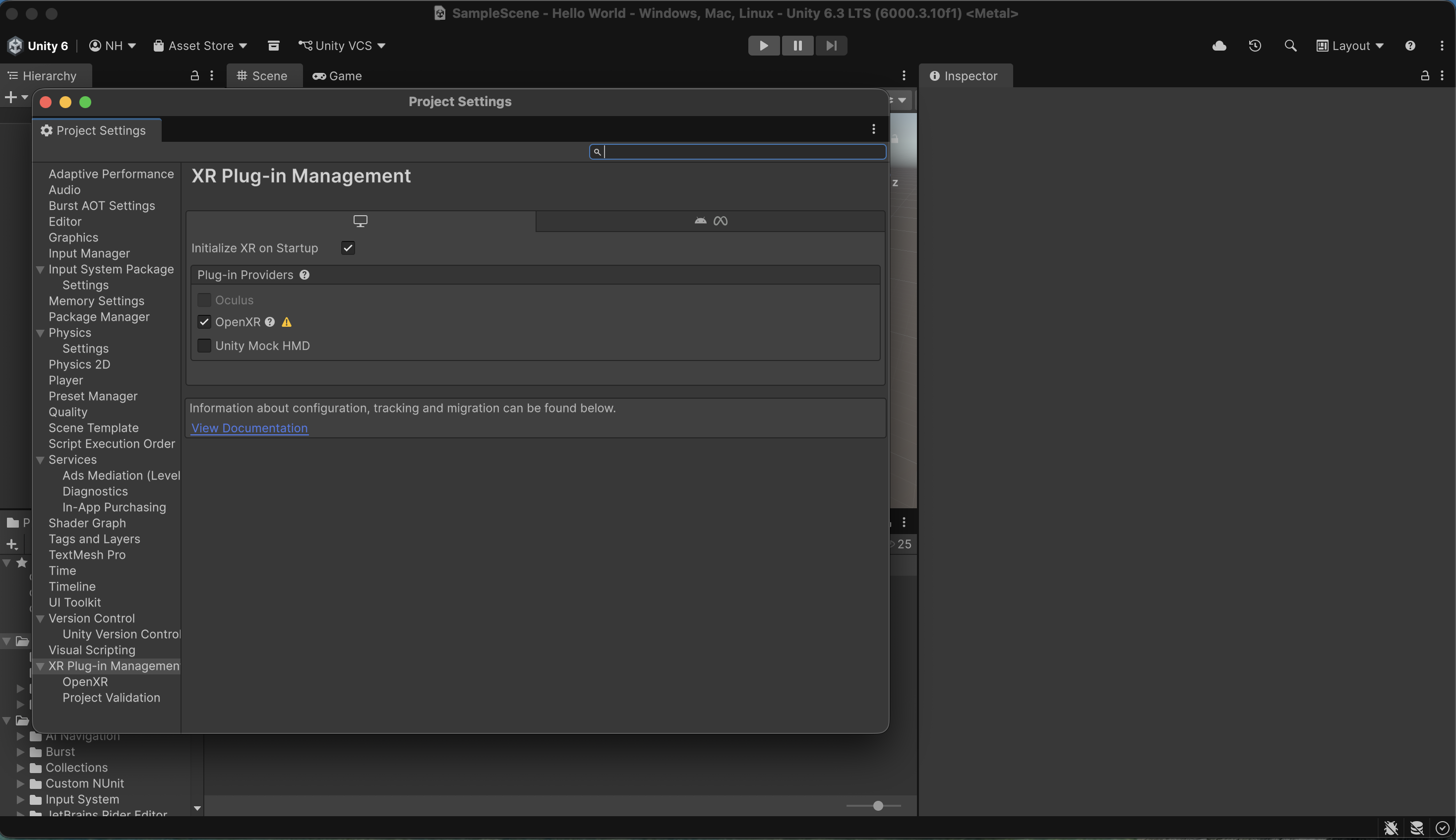
I checked the OpenXR provider in the standalone group tab.
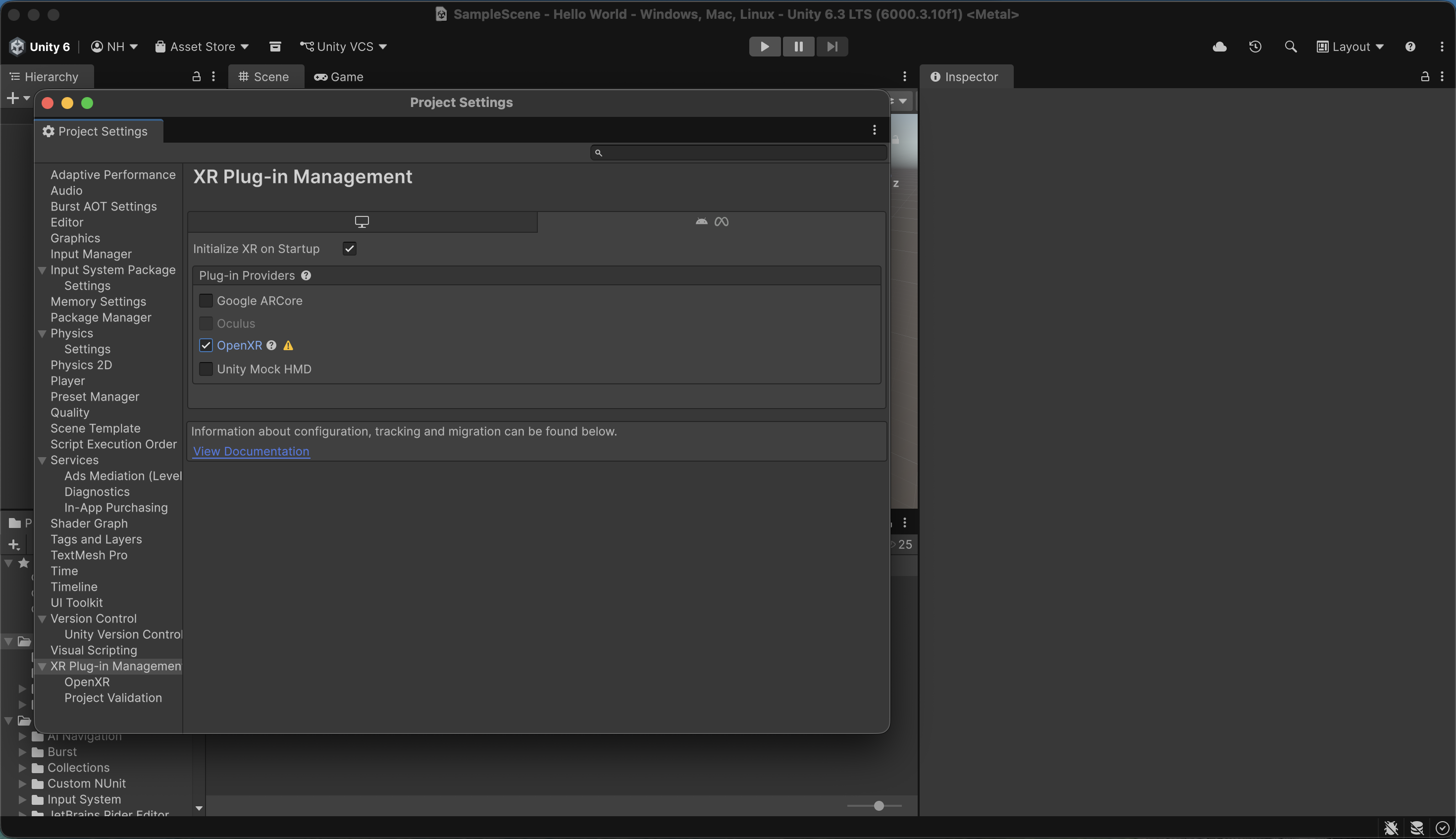
I checked the OpenXR provider in the Meta group tab.
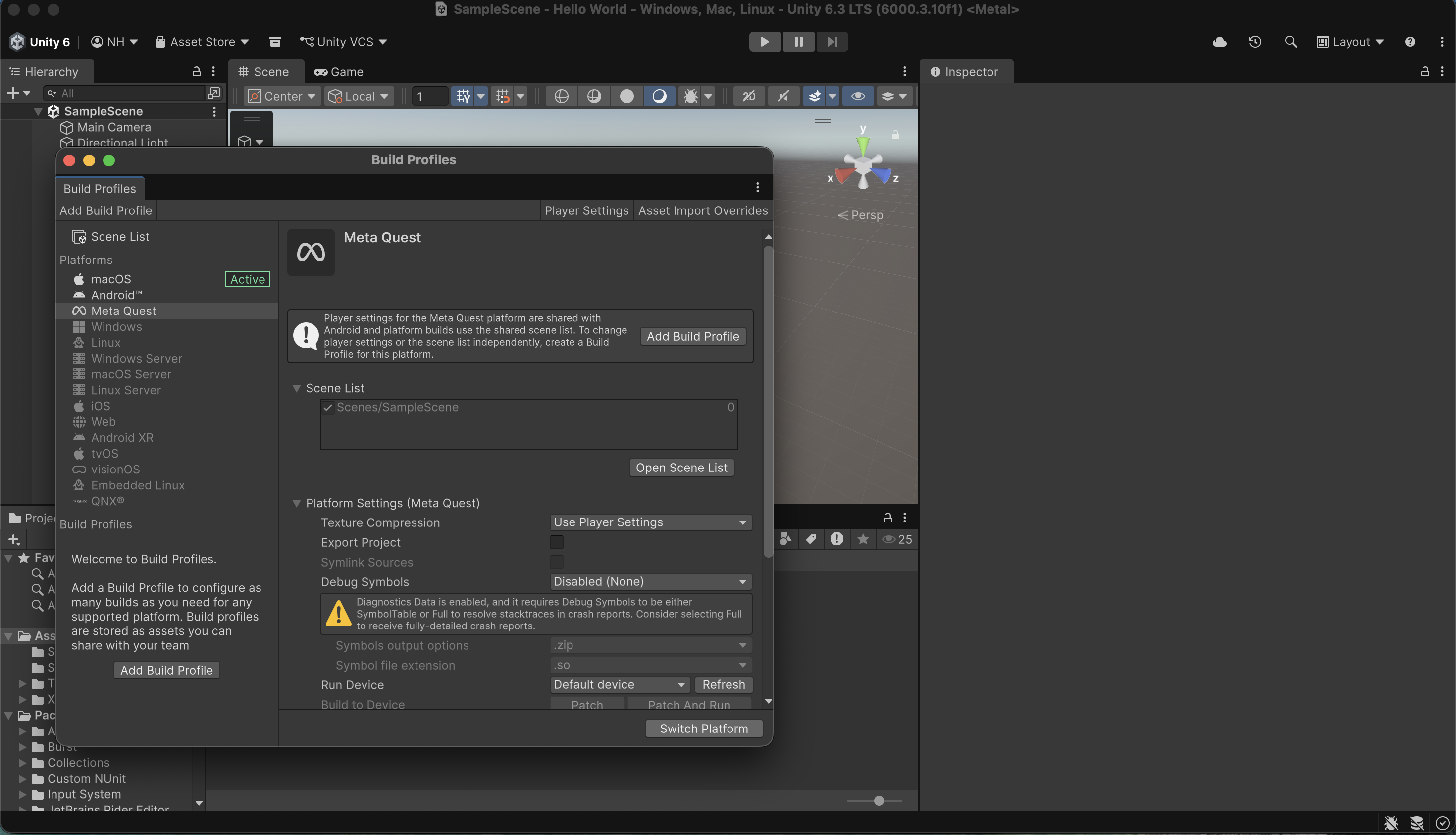
In the Unity editor menu, I selected File > Build Profiles.
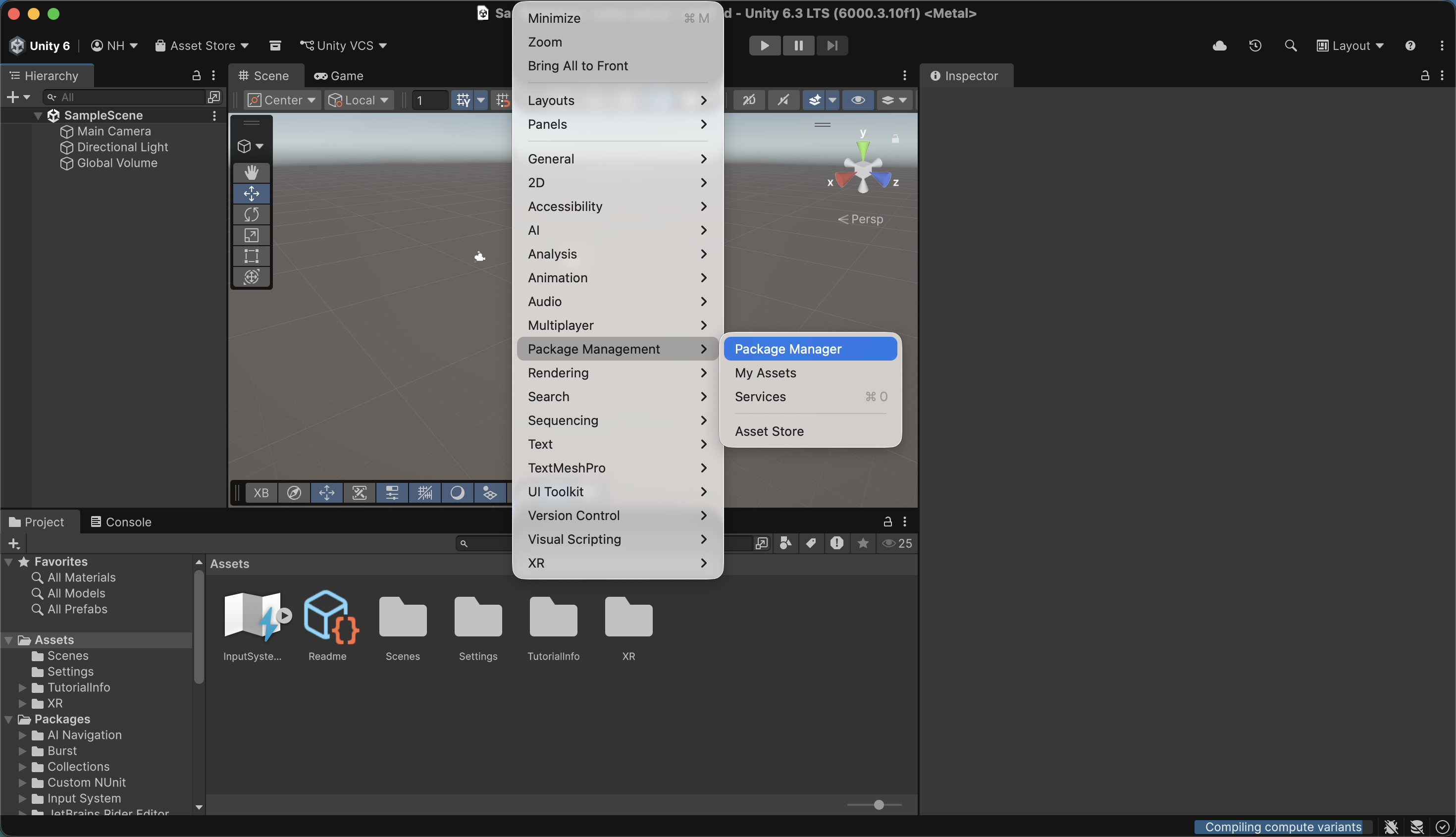
In the Unity Editor menu, I selected Window > Package Manager.
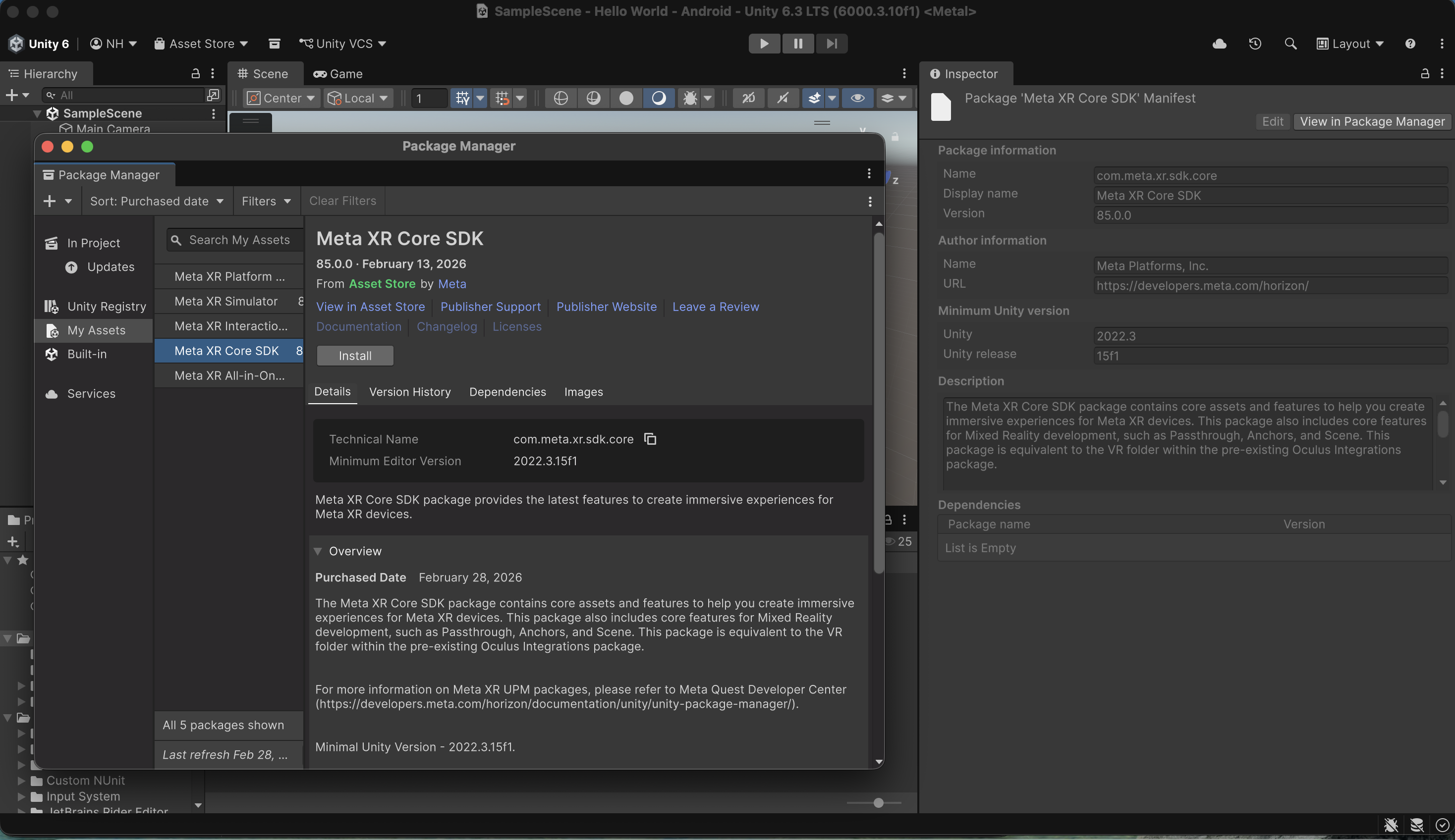
I selected the Meta XR Core SDK and clicked Install.
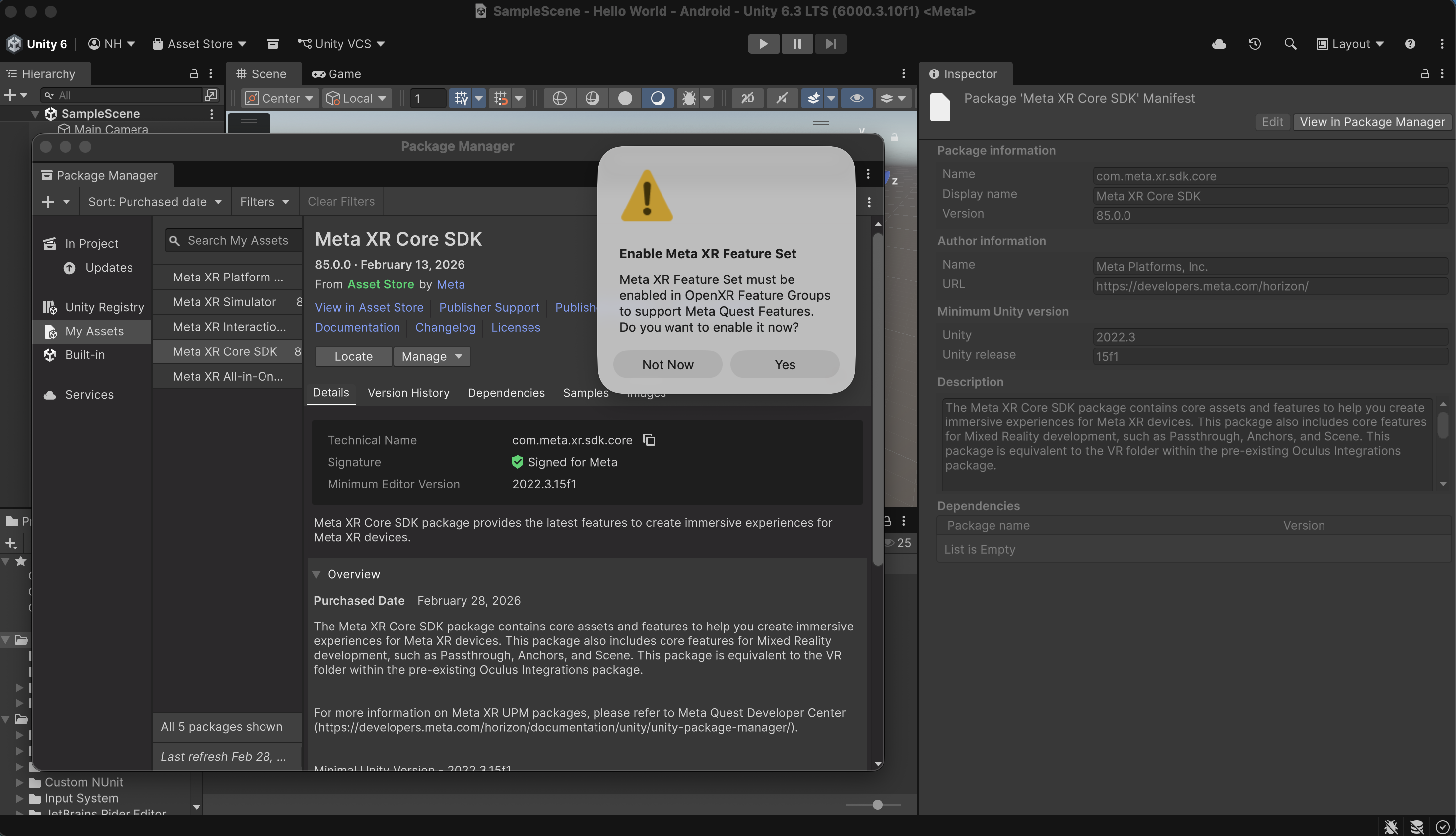
When prompted to enable the Meta XR feature set, I selected Enable.
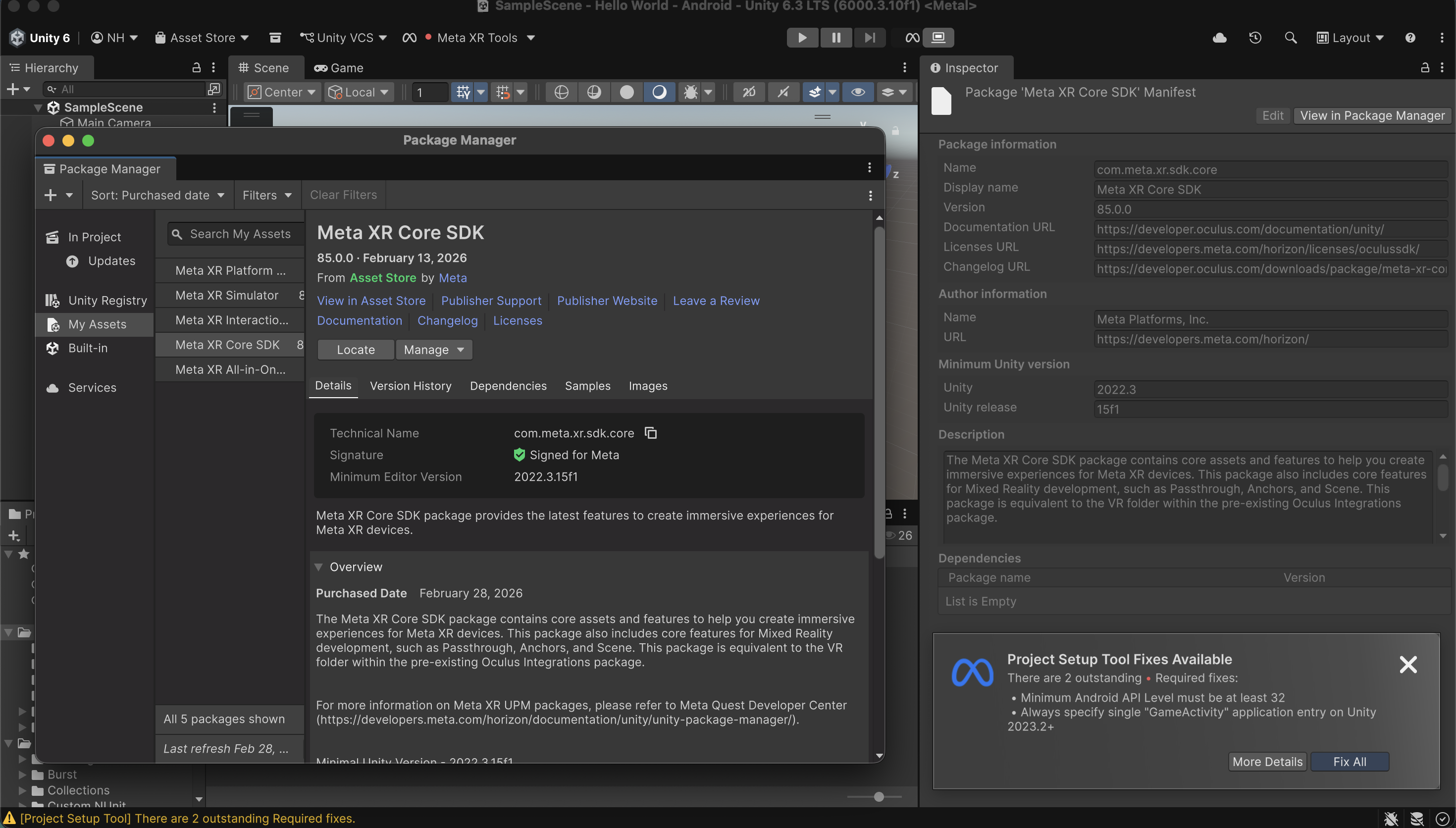
I confirmed that the Meta XR Core SDK was installed
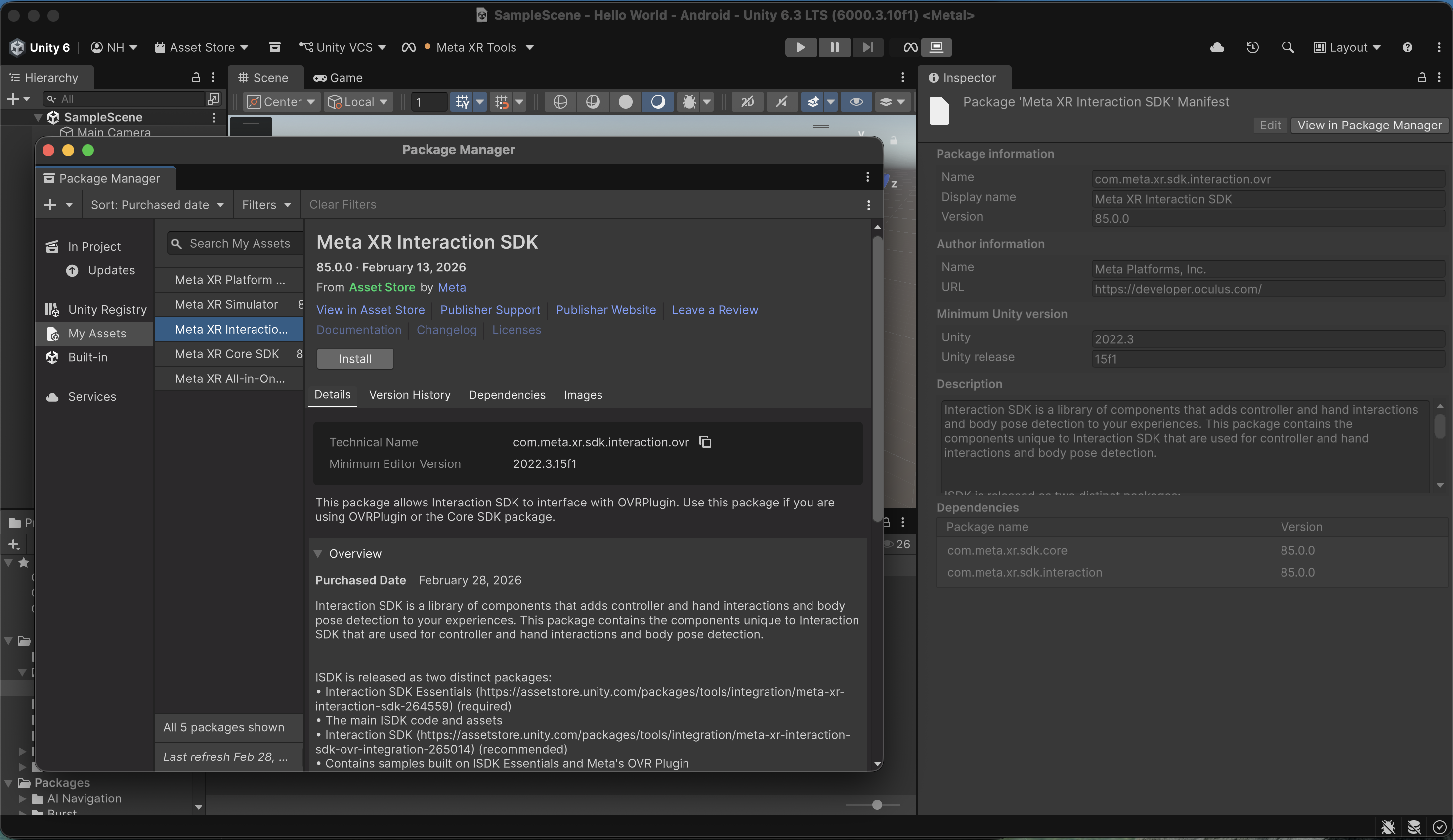
I selected the Meta XR Interaction SDK and clicked Install
I installed the Meta XR Interaction SDK

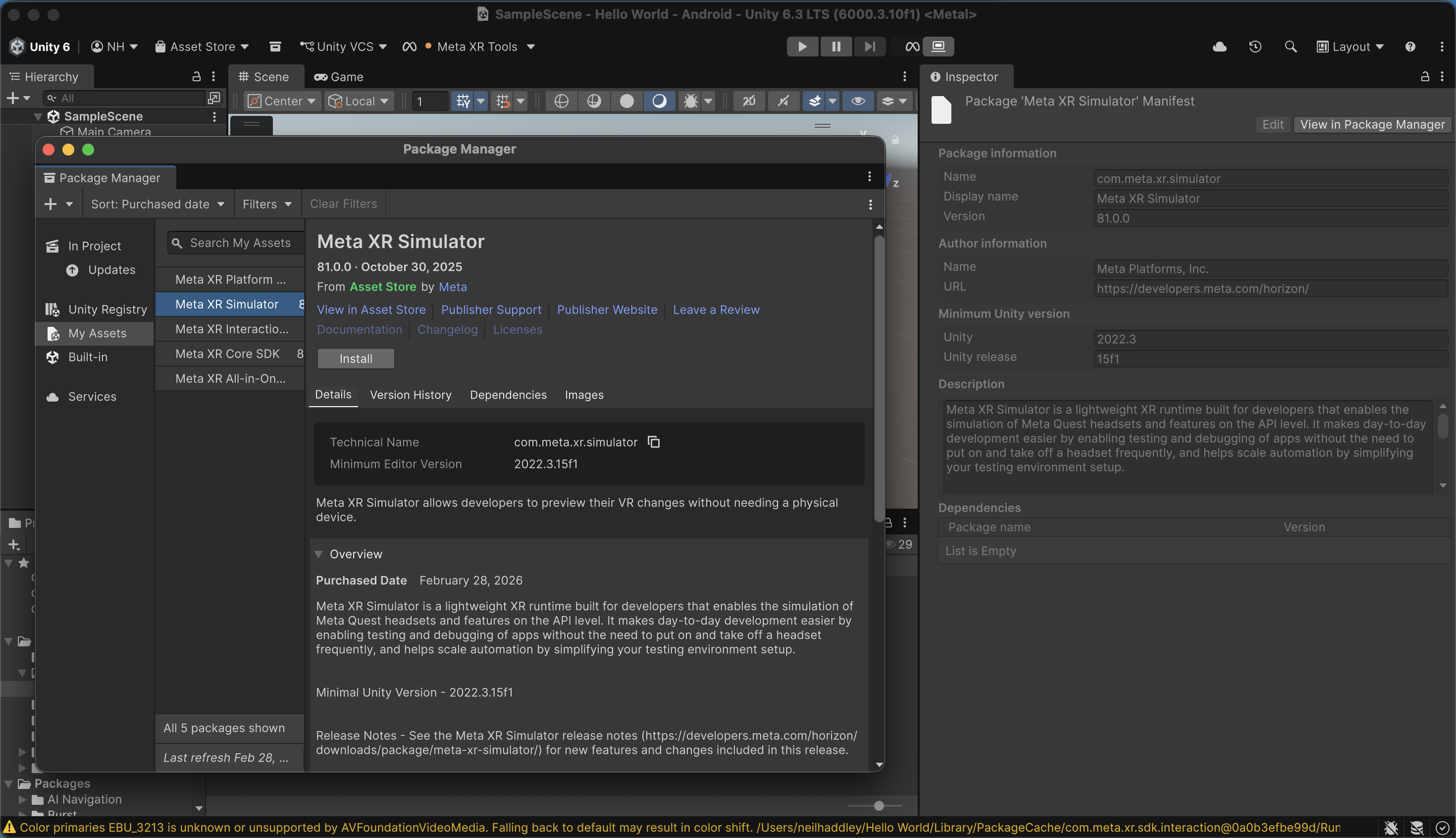
I installed the Meta XR Simulator
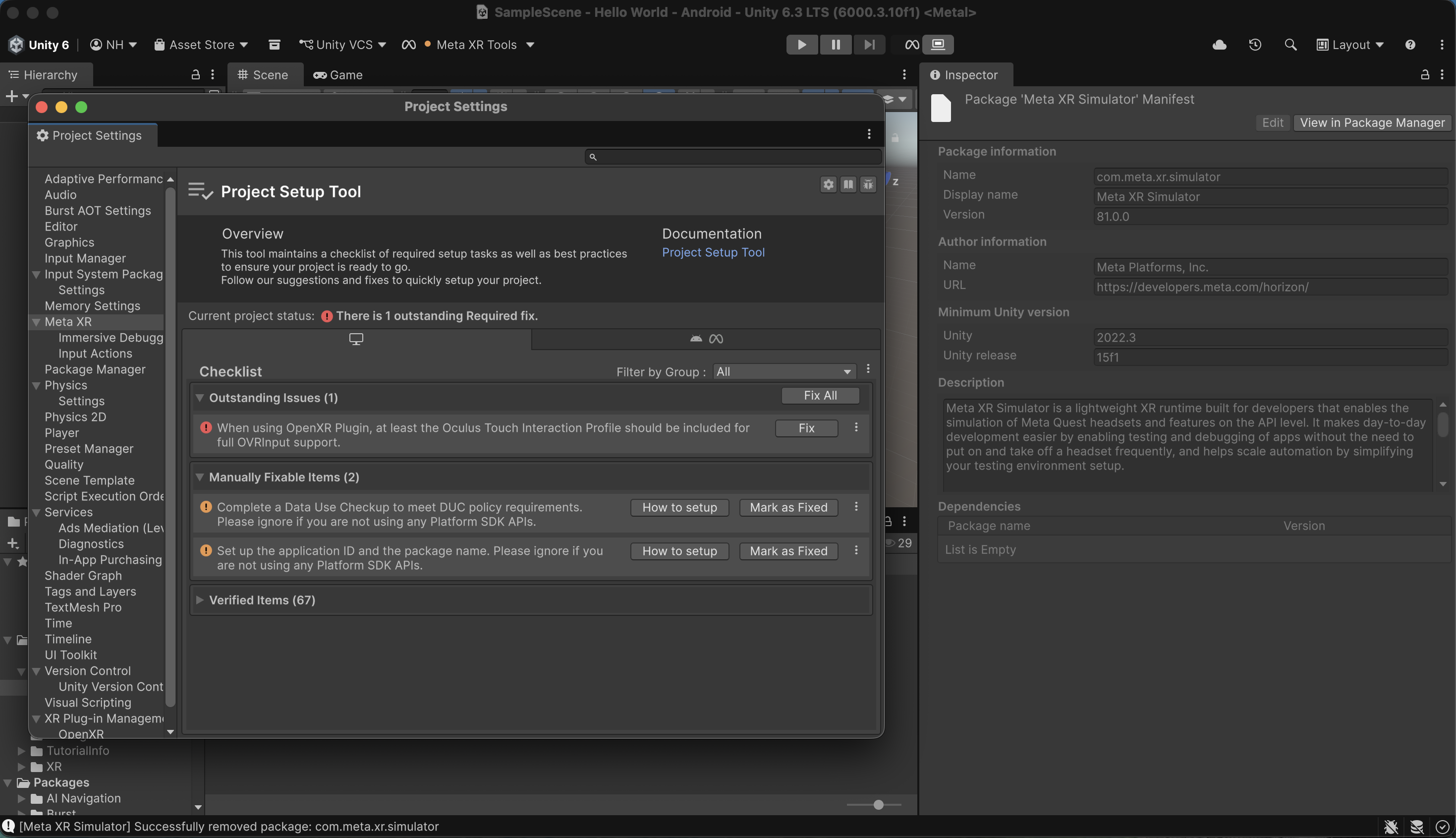
From the top of the Unity Editor, I expanded the Meta XR Tools drop-down list, and then I selected Project Setup Tool.
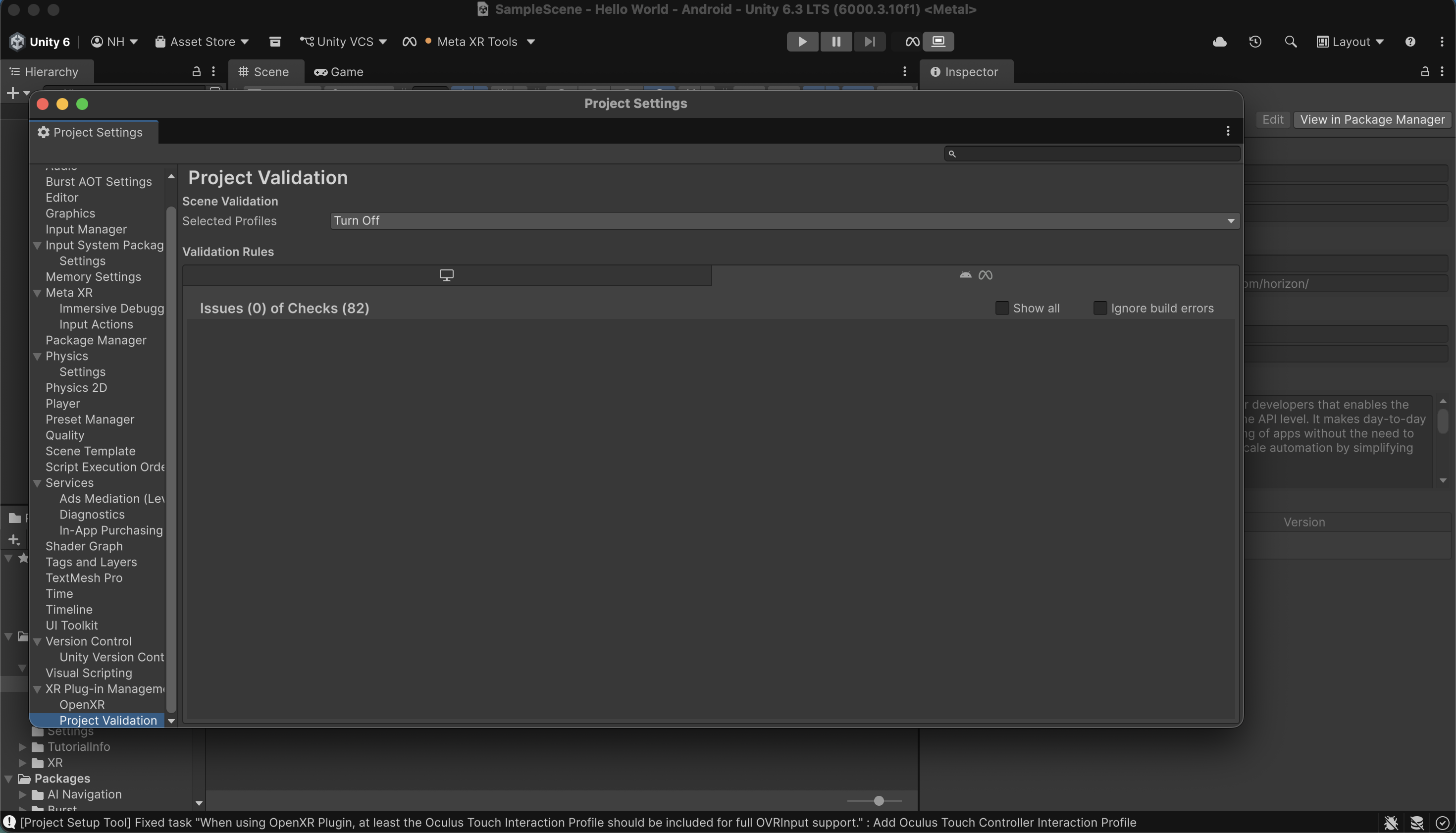
I navigated to Project Settings > XR Plug-in Management > Project Validation.
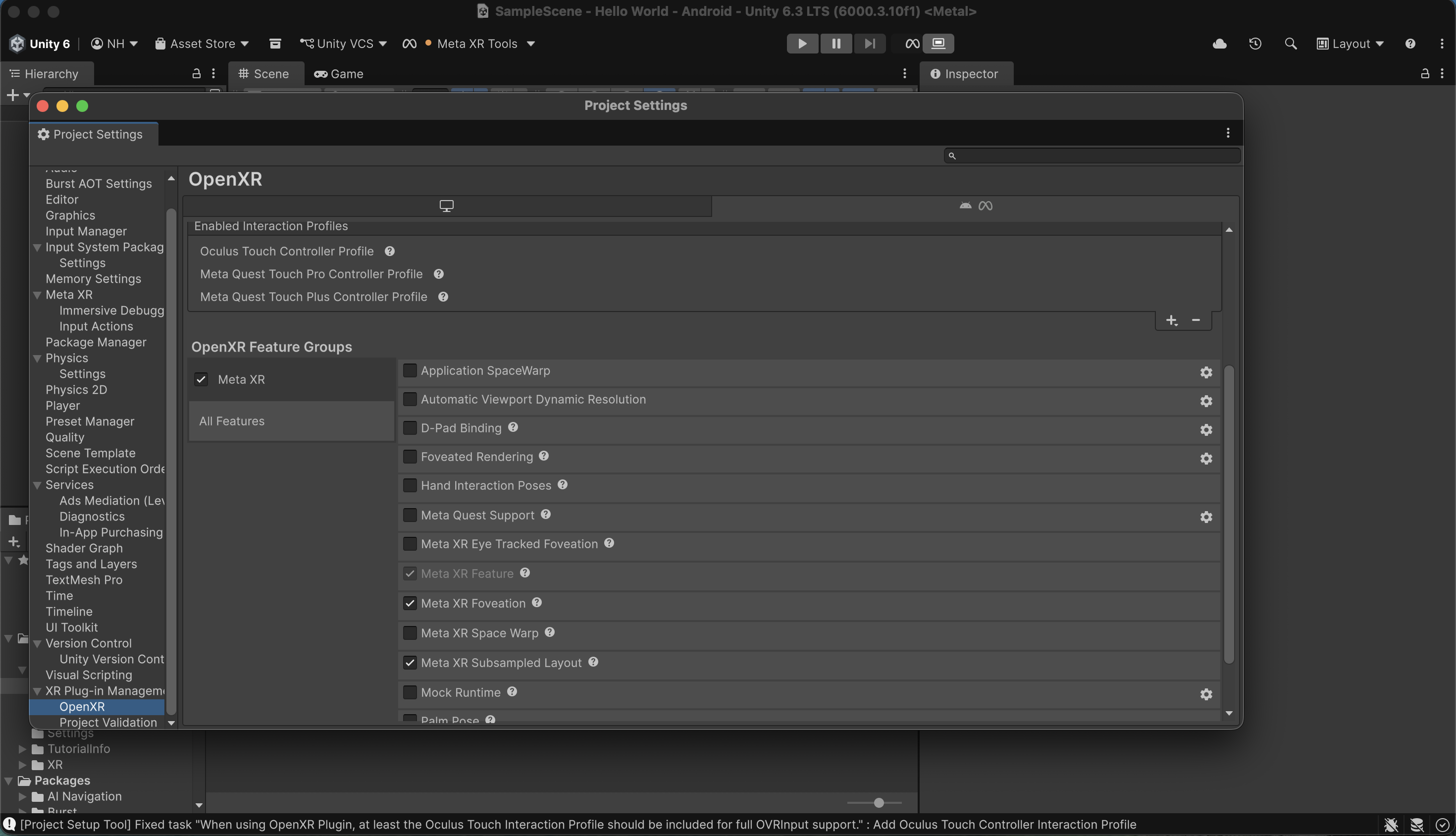
I navigated to Project Settings > XR Plug-in Management > OpenXR and selected the Android tab.
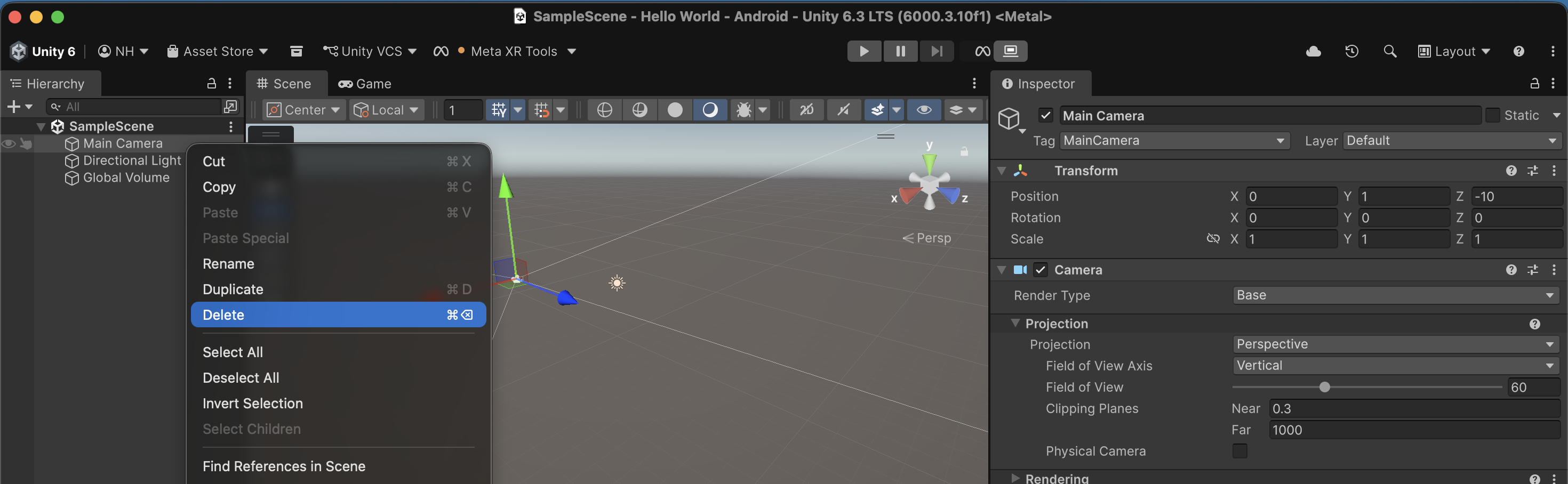
In the Hierarchy pane, I deleted the Main Camera from my project’s SampleScene.
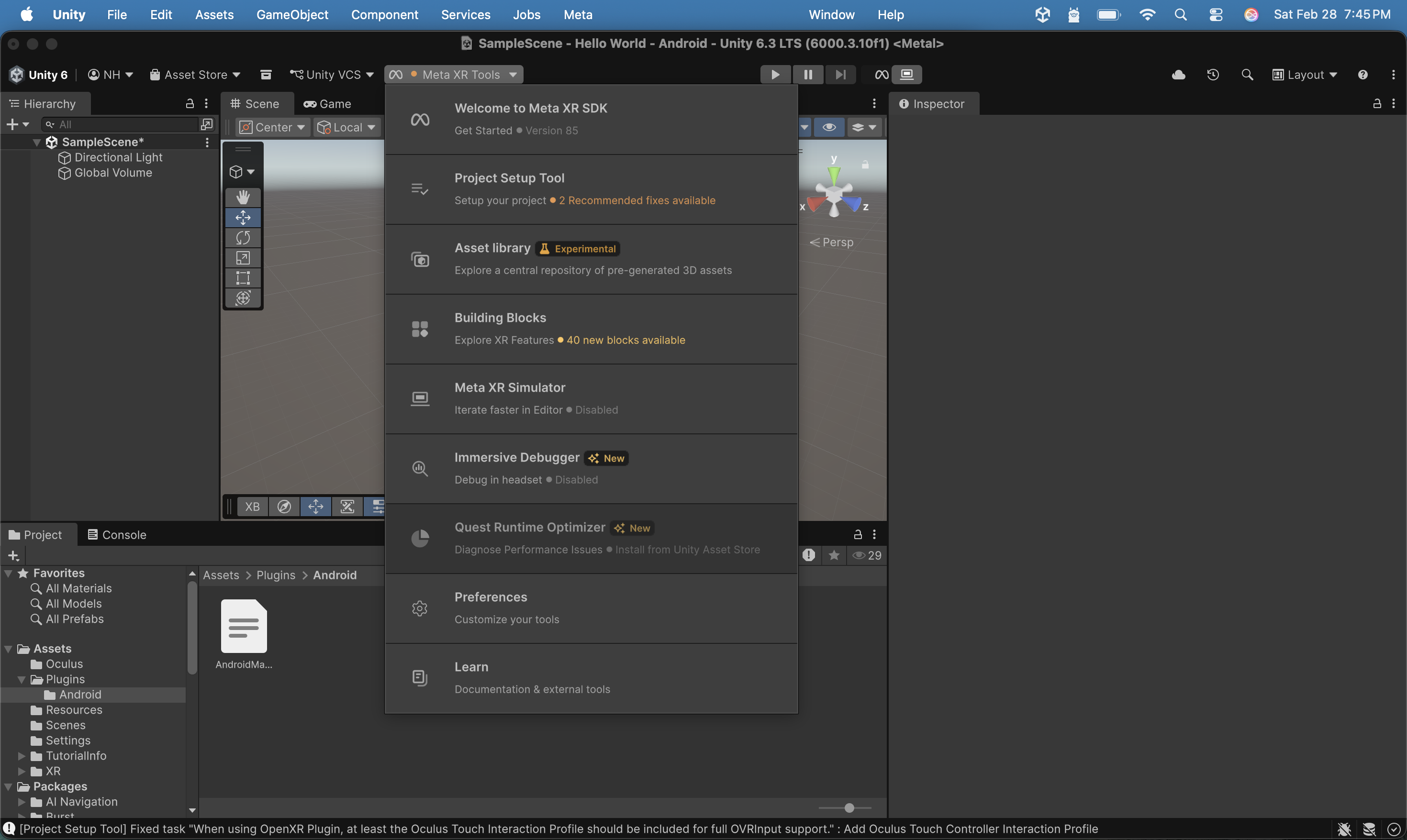
I selected Meta XR Tools > Building Blocks from the drop-down toolbar menu in the editor.
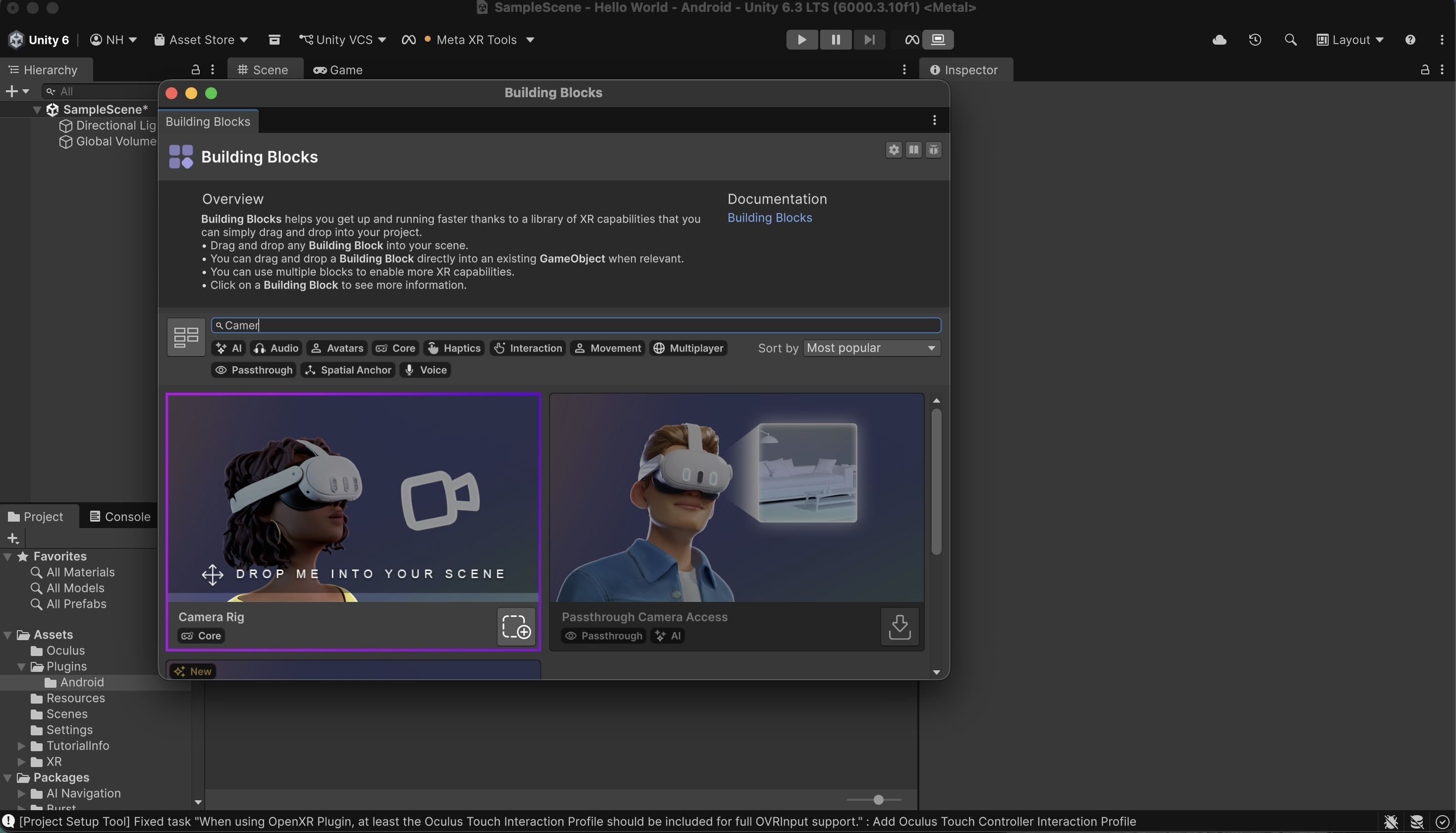
In the Building Blocks window, I found the Camera Rig Building Block, and selected the icon on the bottom right of the block to add it to the project.
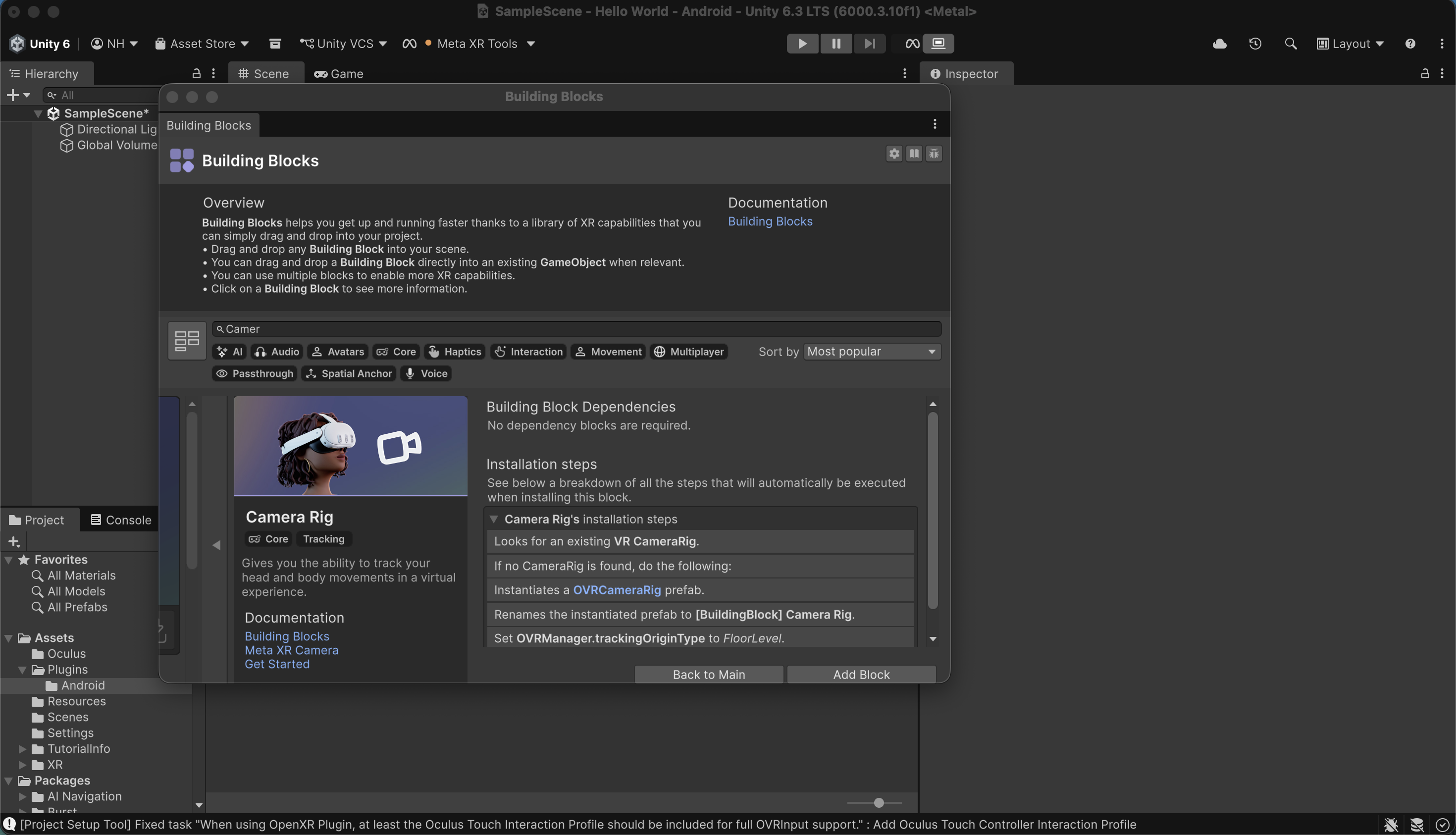
I added the Camera Rig object
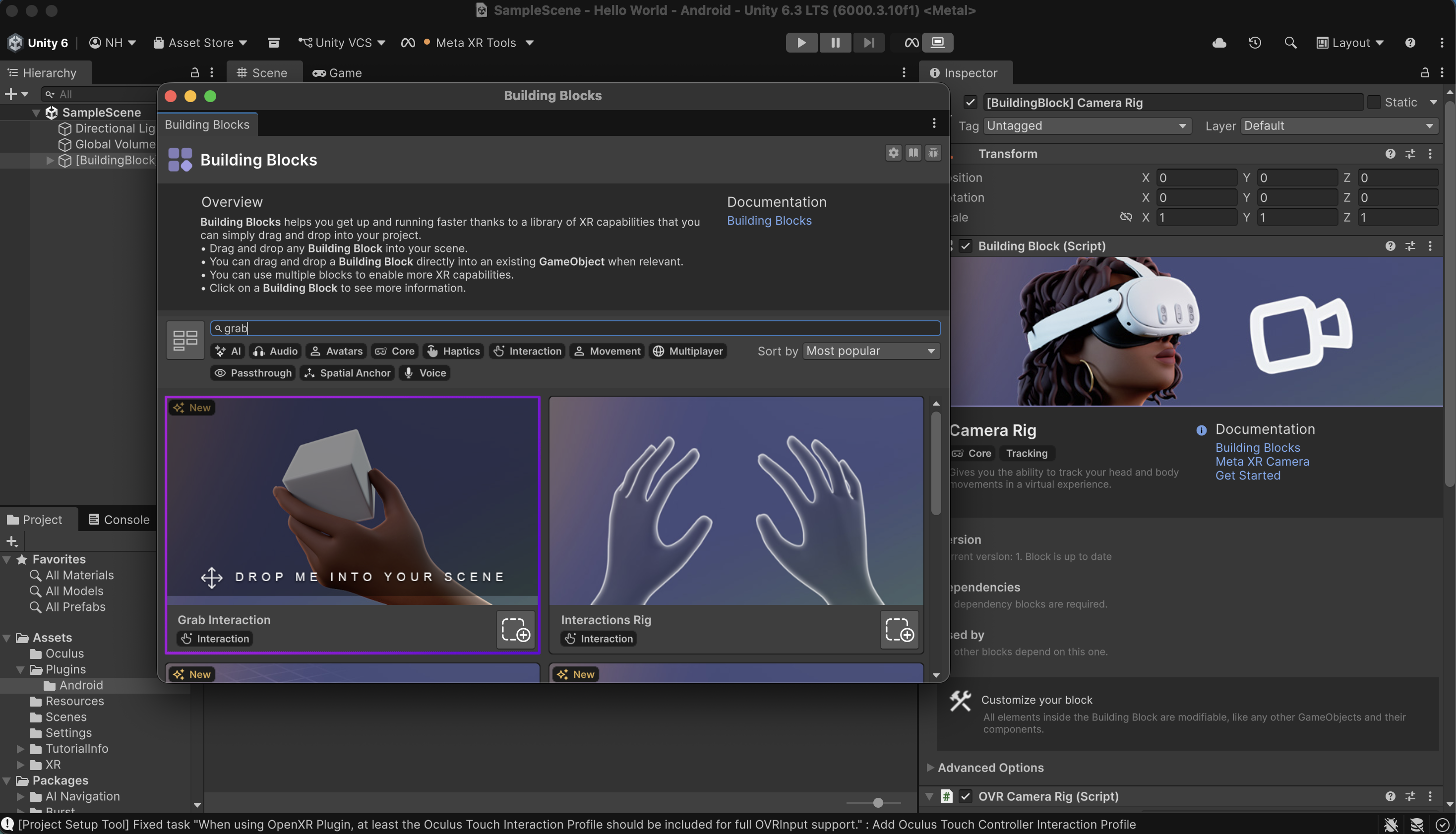
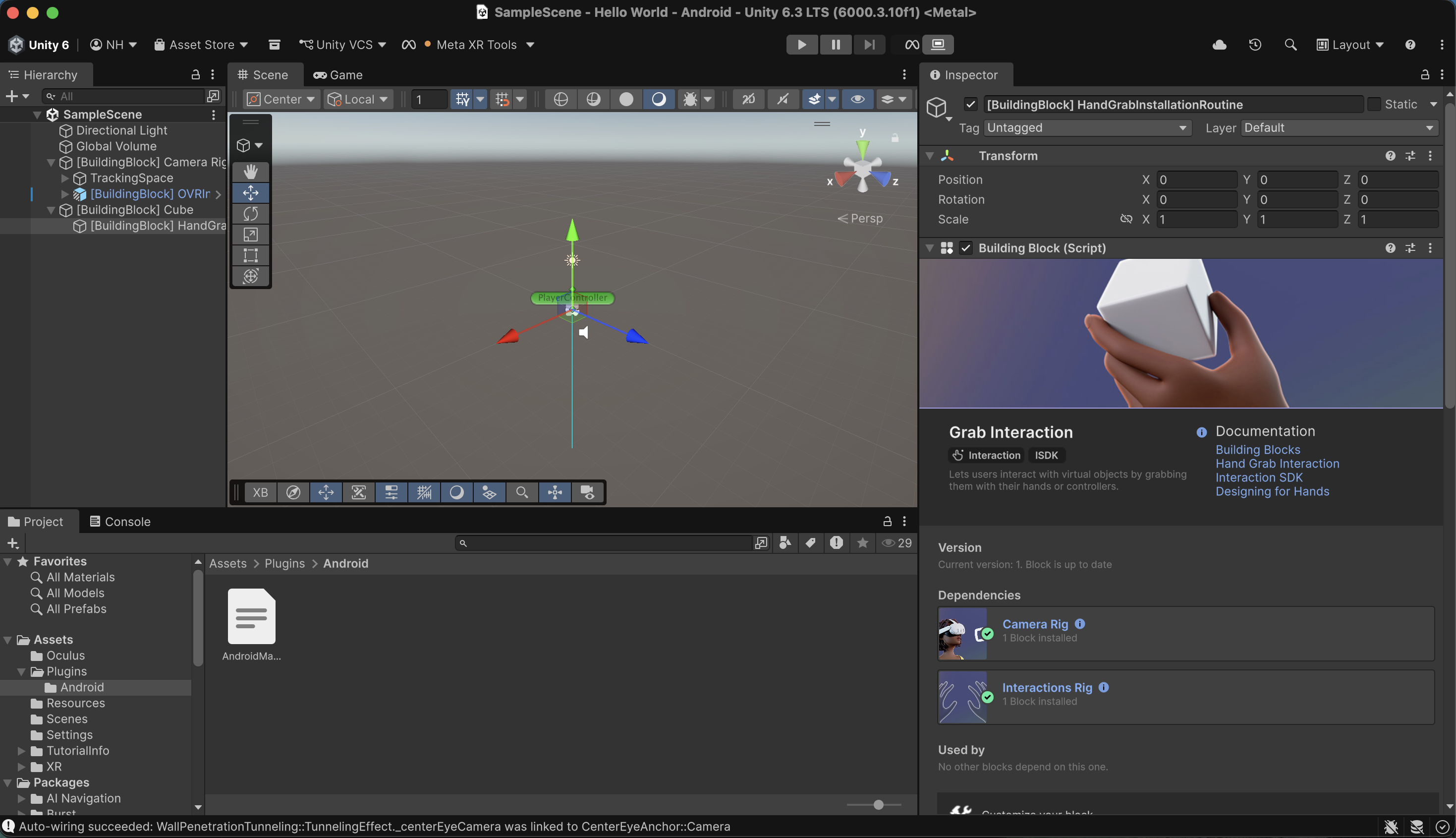
In the Building Blocks window, I found the Grab Interaction Building Block, and I selected the icon on the bottom right of the block to add it to the project.
I selected the Cube
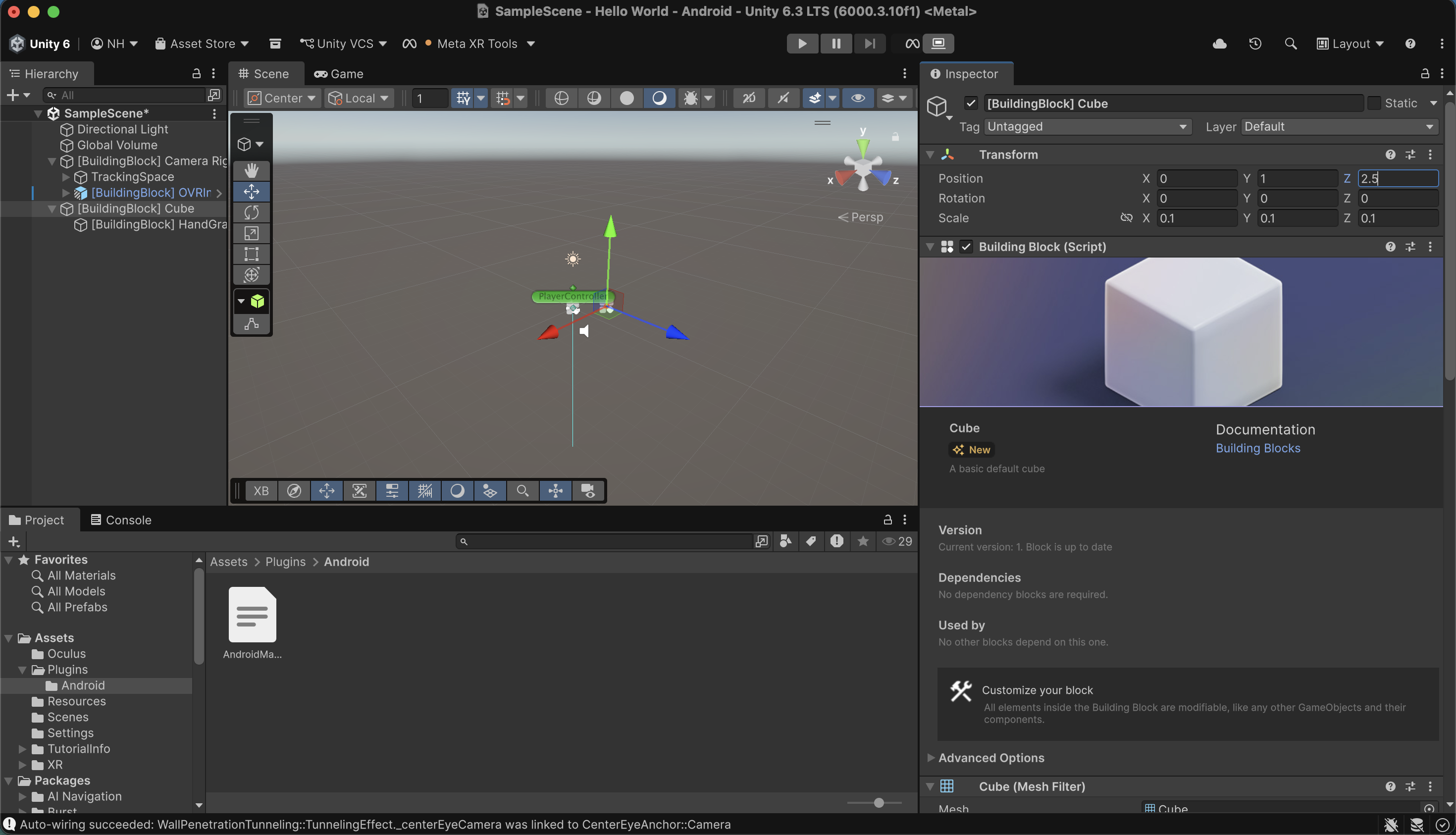
I updated the position of the cube
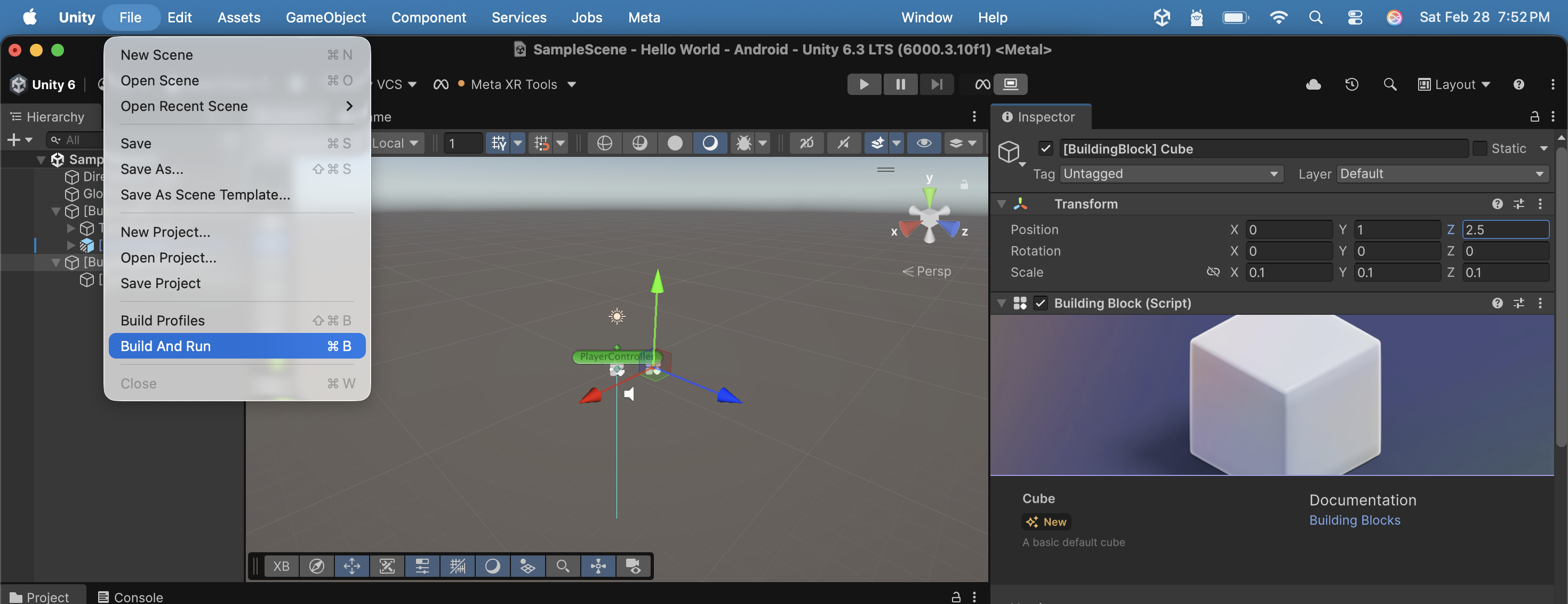
I clicked the 'Build And Run' menu item
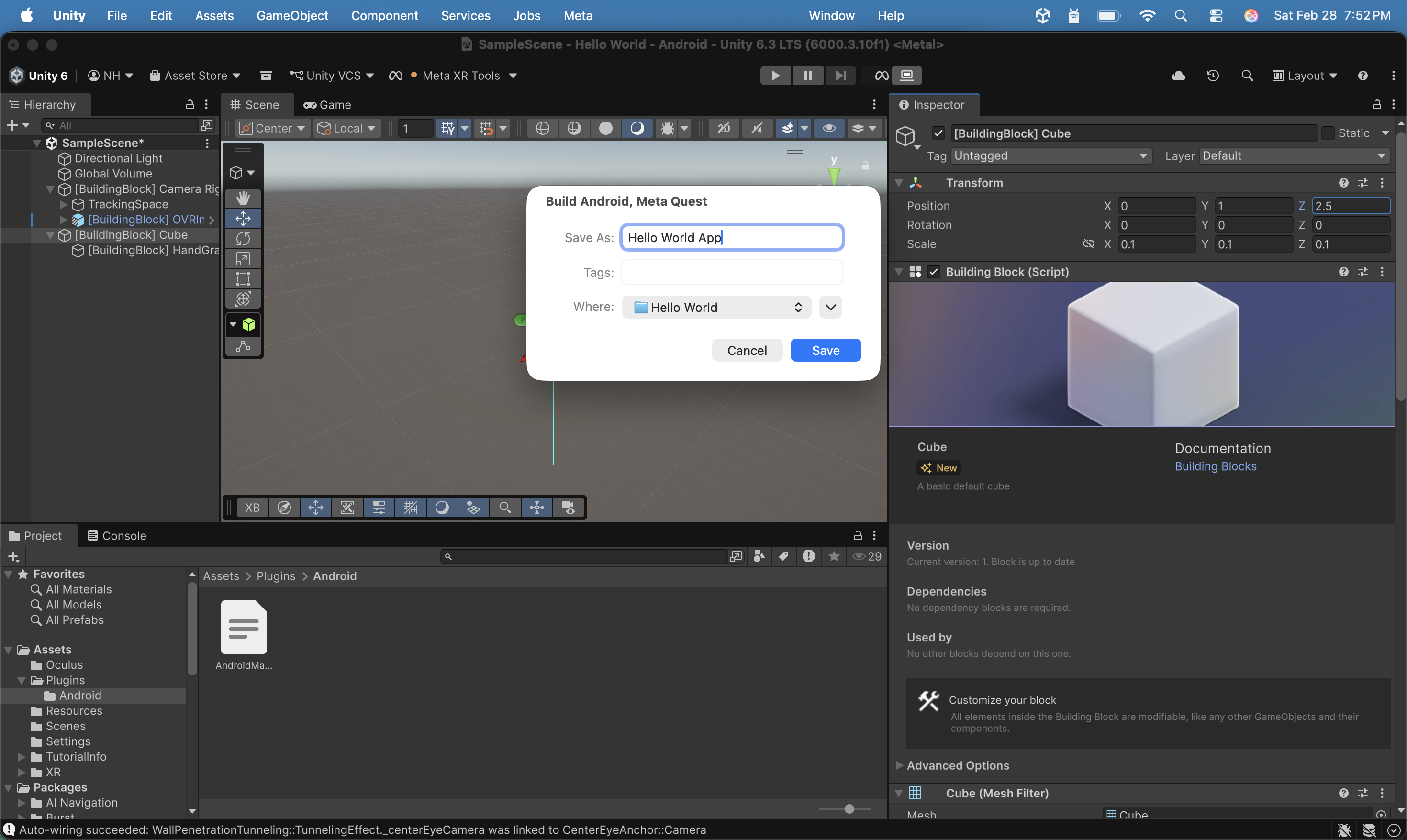
I saved the file as `Hello World App.apk`

I connected my Quest 3 headset to my laptop
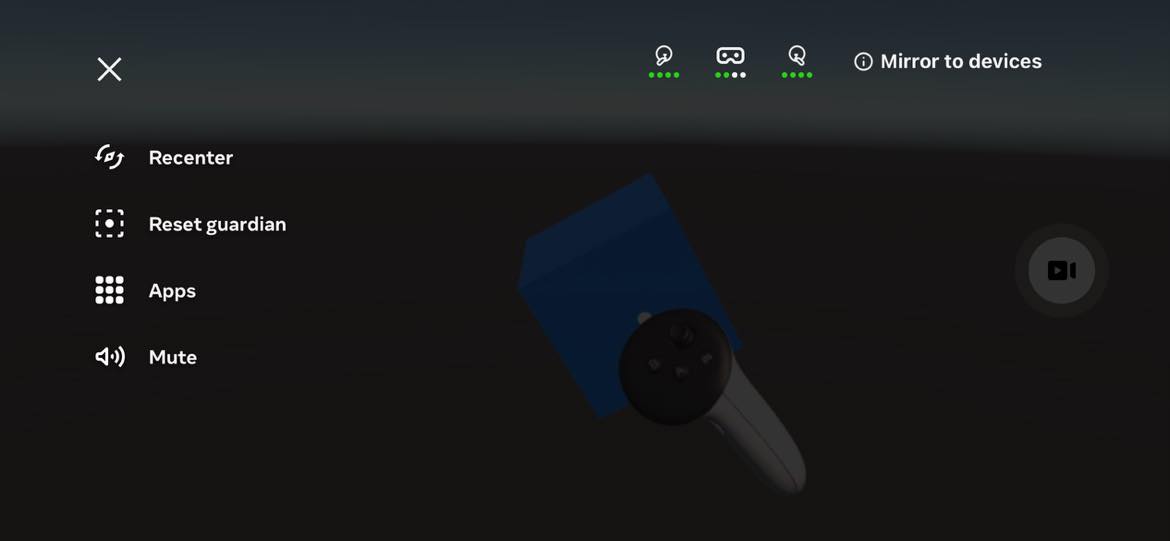
I used the Cast feature of the Meta Horizon mobile app to capture an image of myself grasping and moving the cube
Add more Cubes using Claude Code
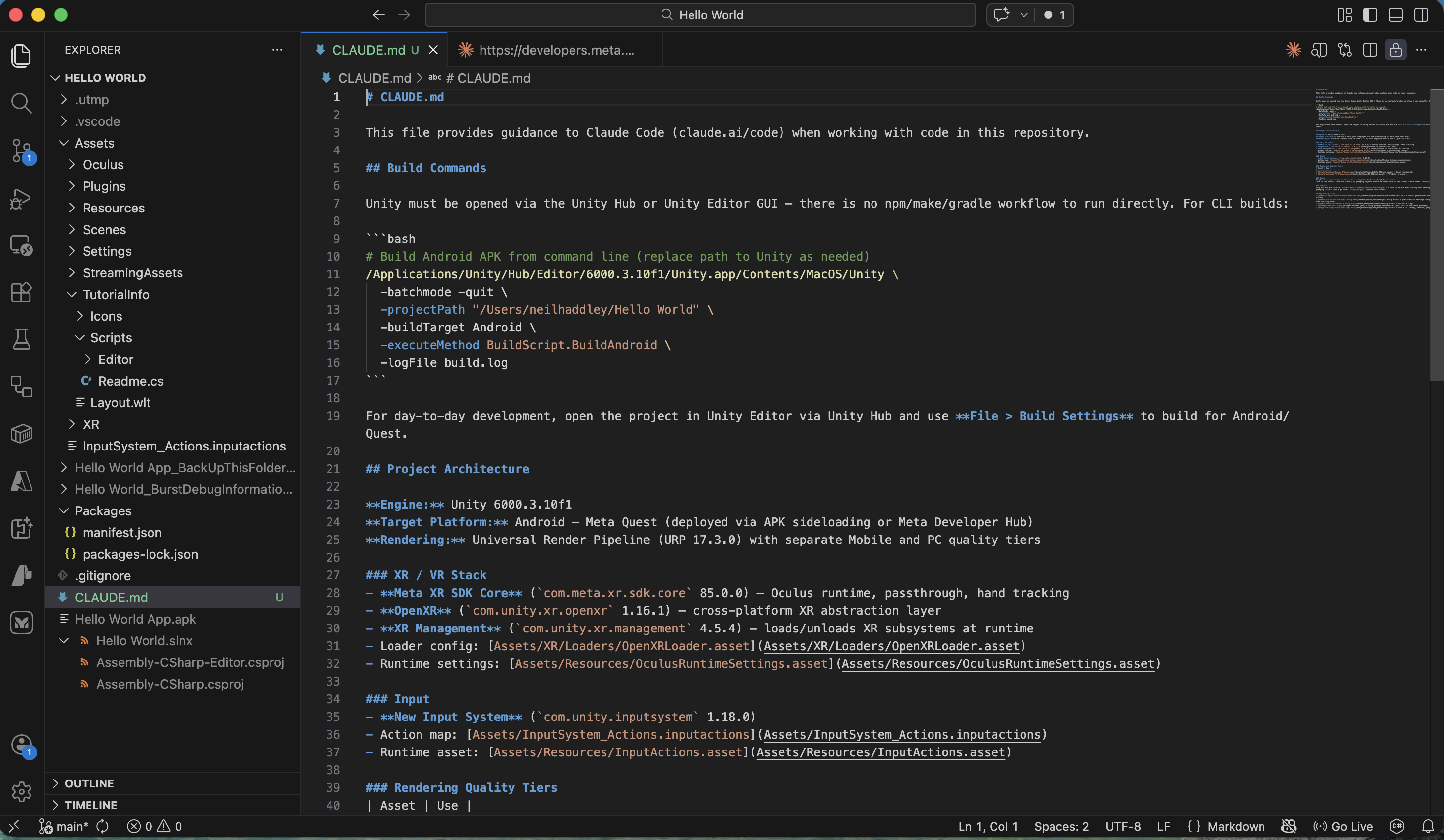
I opened the project using Visual Studio Code and used /init to create a CLAUDE.md file
PROMPT
1Describe the scene
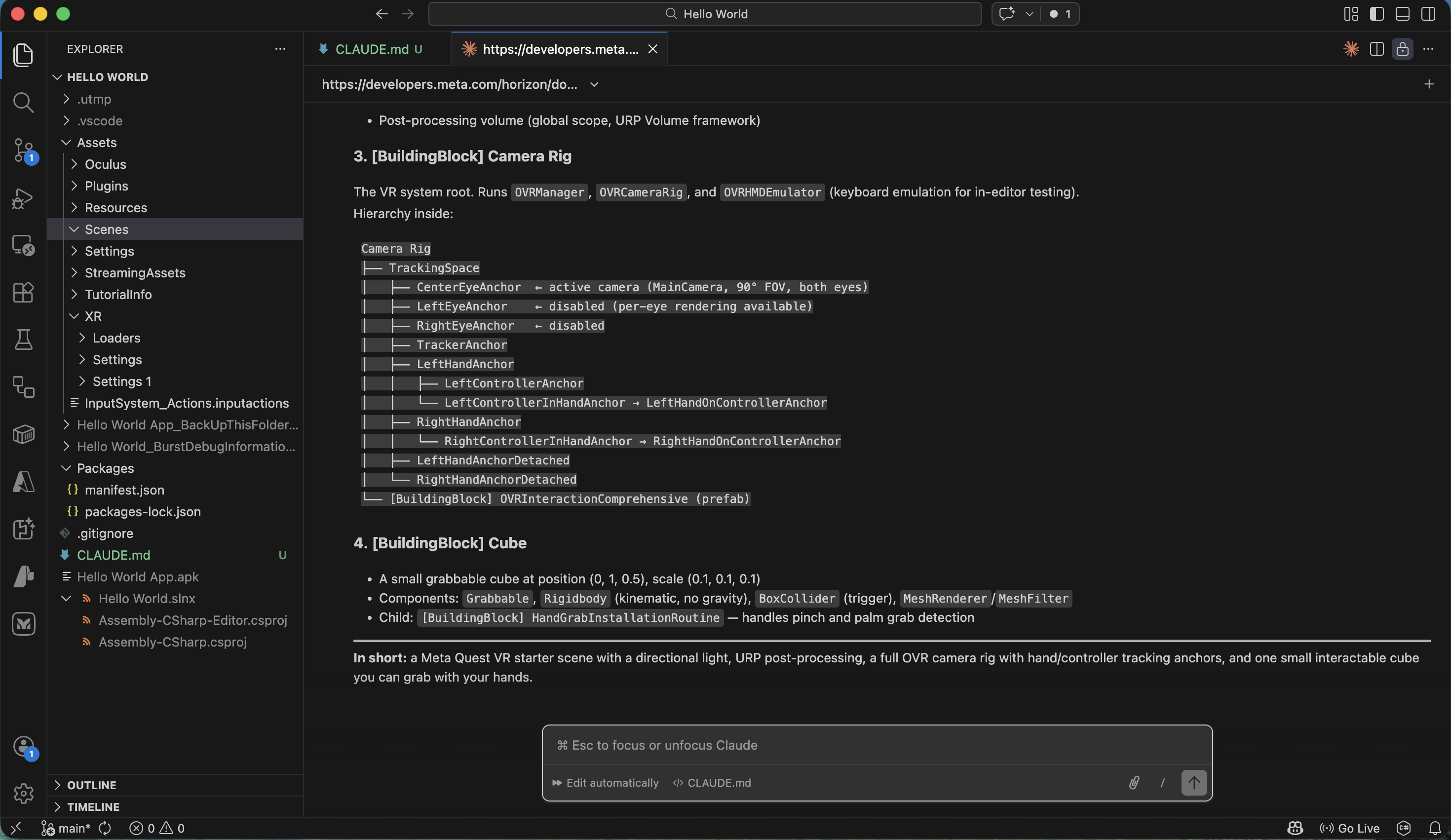
I reviewed Claude Code's description of the scene
PROMPT
1How can we add an extra 5 cubes to the scene?
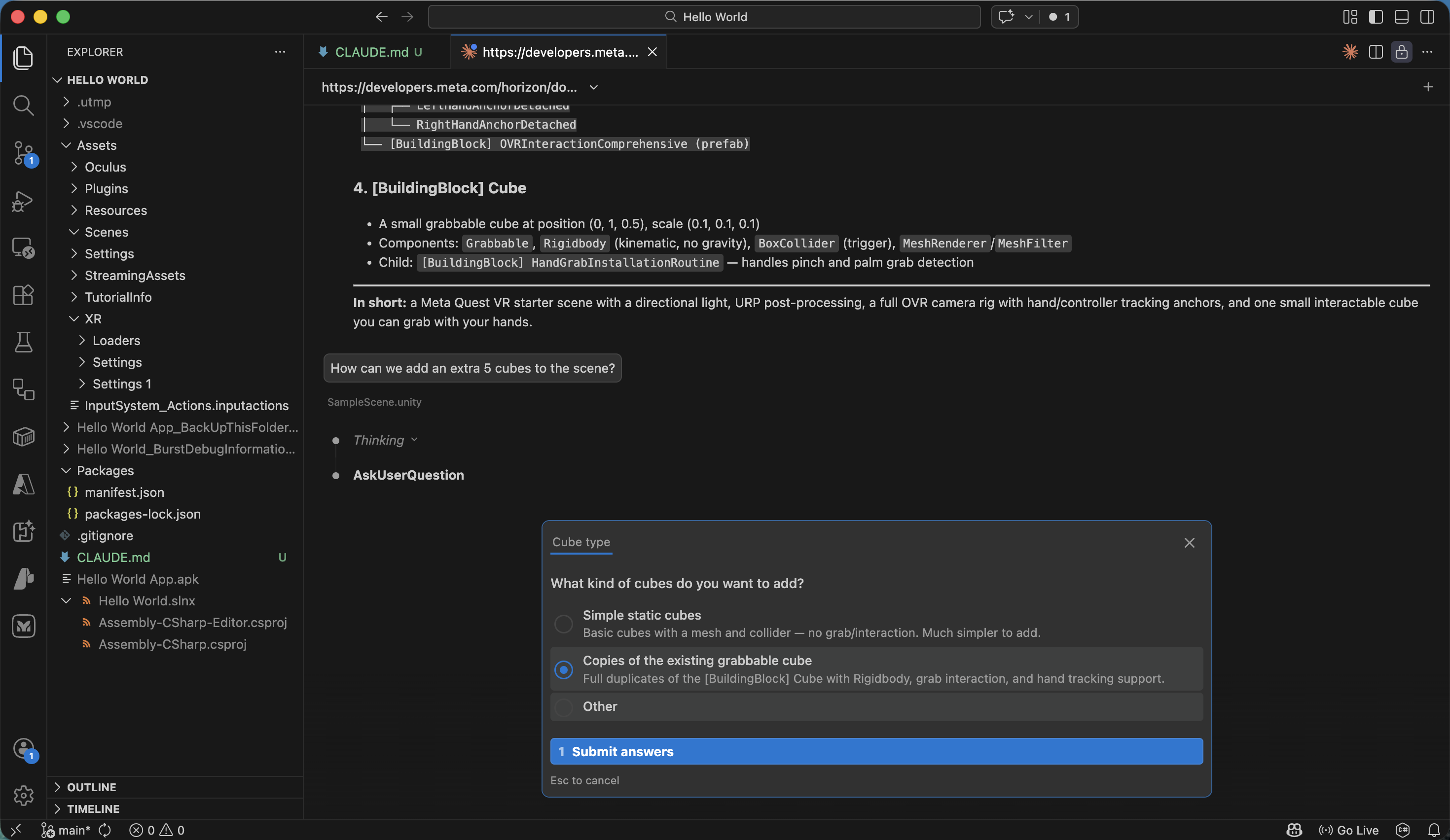
I selected the 'Copies of the existing grabbable cube' option
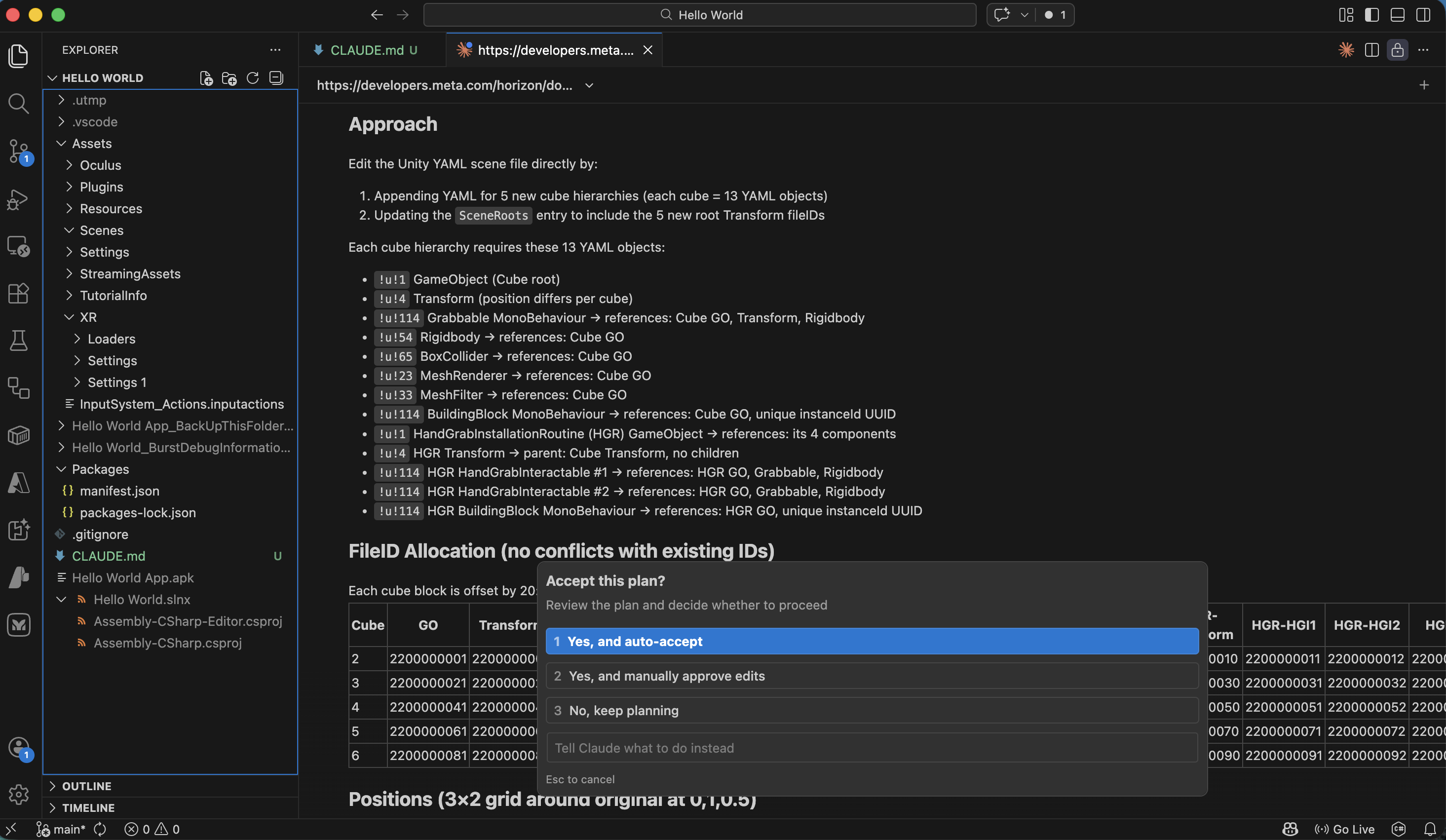
I clicked Yes to apply the planned update
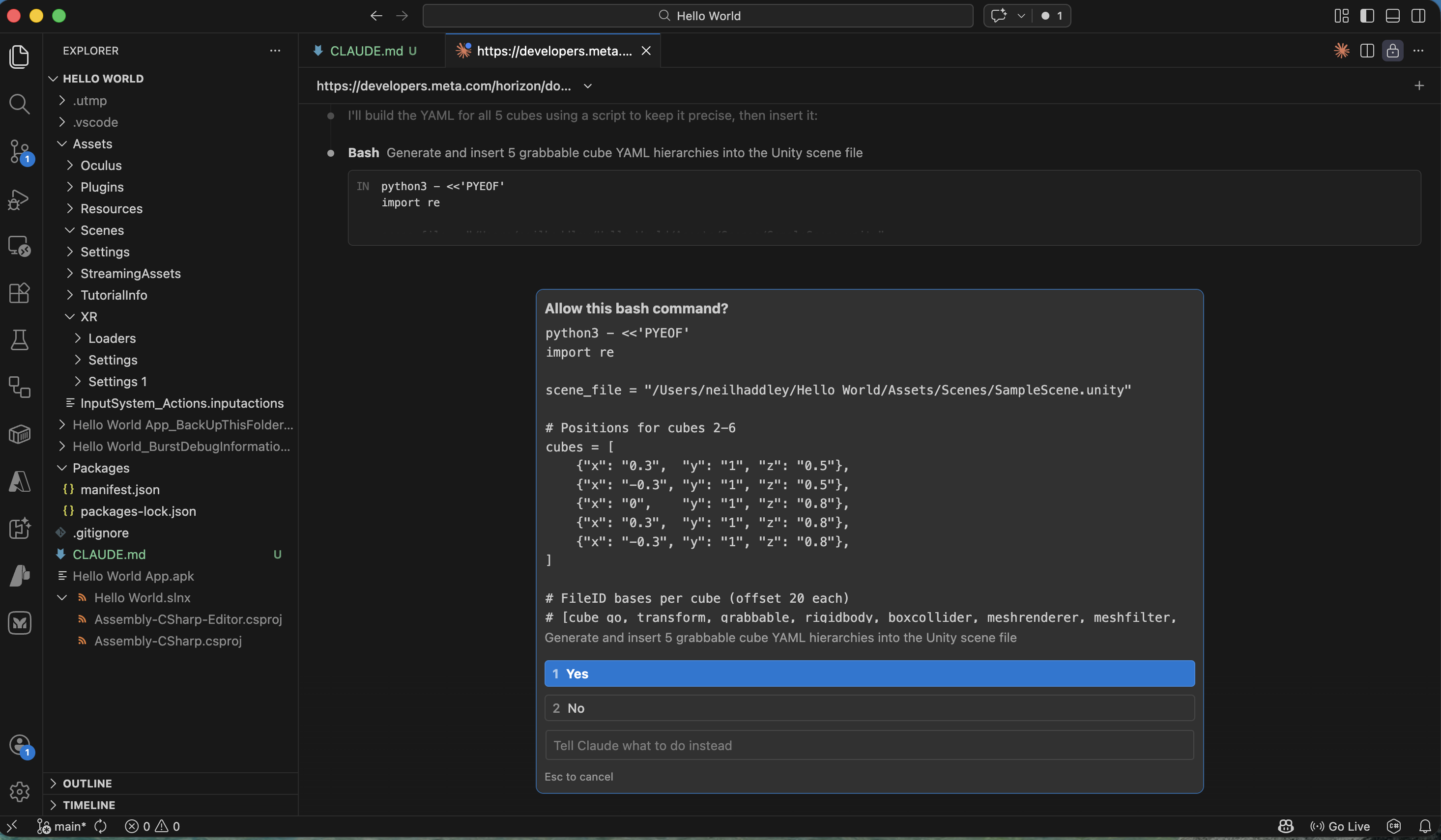
I clicked Yes to allow the bash command to run
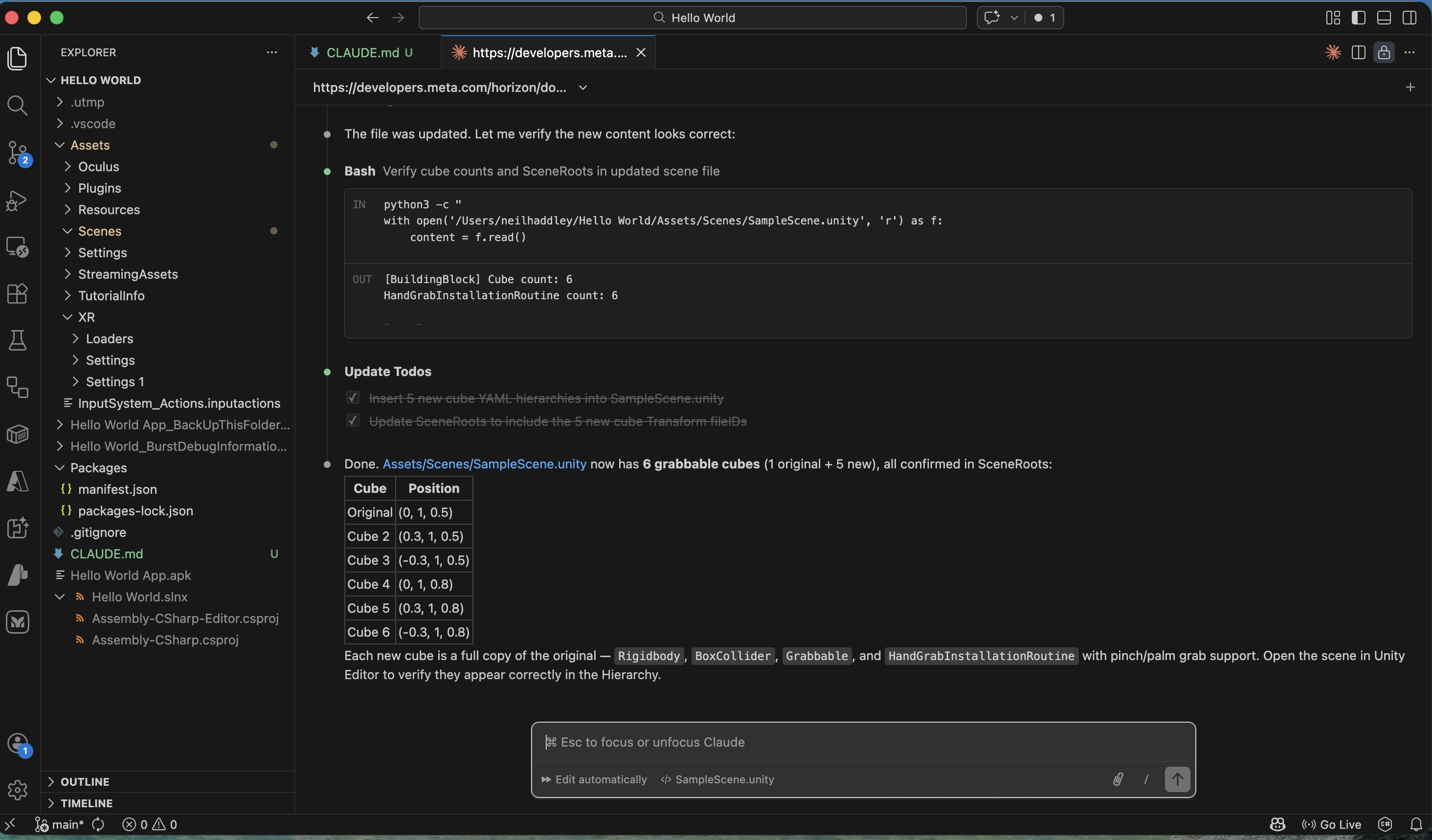
I confirmed the update was applied
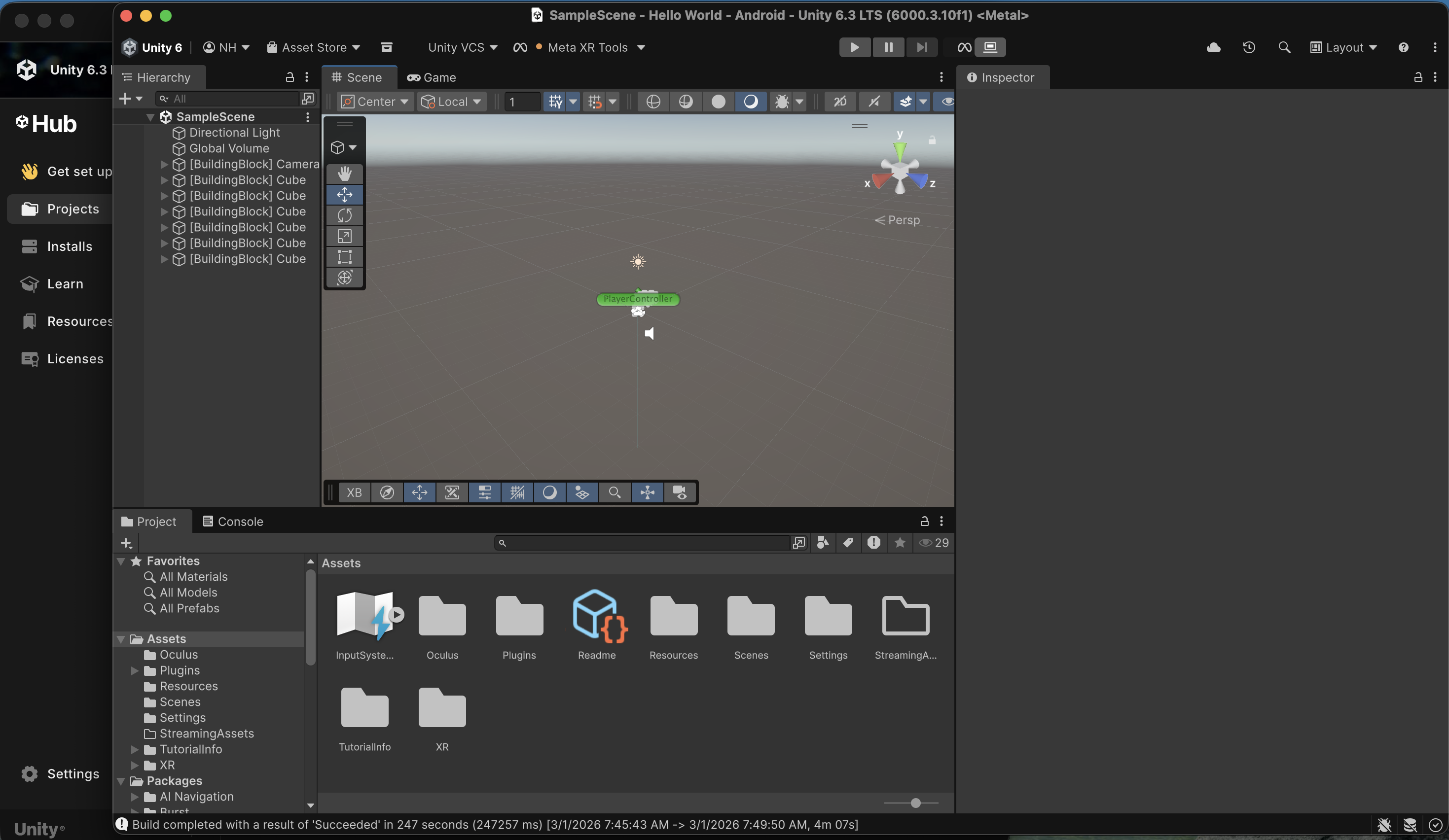
I selected the Build and Run command in Unity

I used the Quest 3 headset to grab and move the 6 cubes
Switch to Passthrough with Claude Code
PROMPT
1review this page https://developers.meta.com/horizon/documentation/unity/unity-passthrough-tutorial/ then update the scene to use "passthrough"
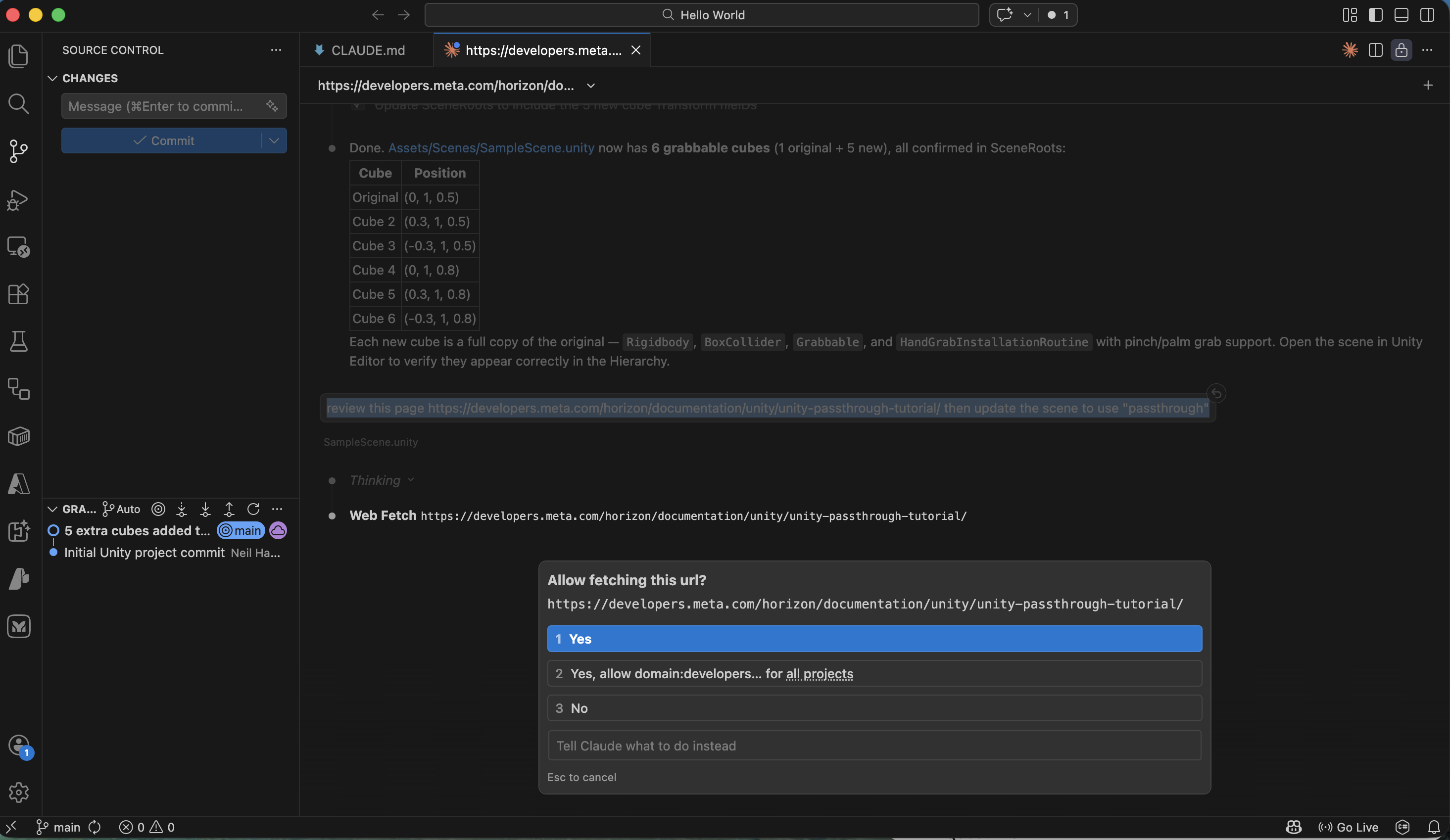
I clicked Yes to allow Claude Code to fetch the Meta passthrough tutorial
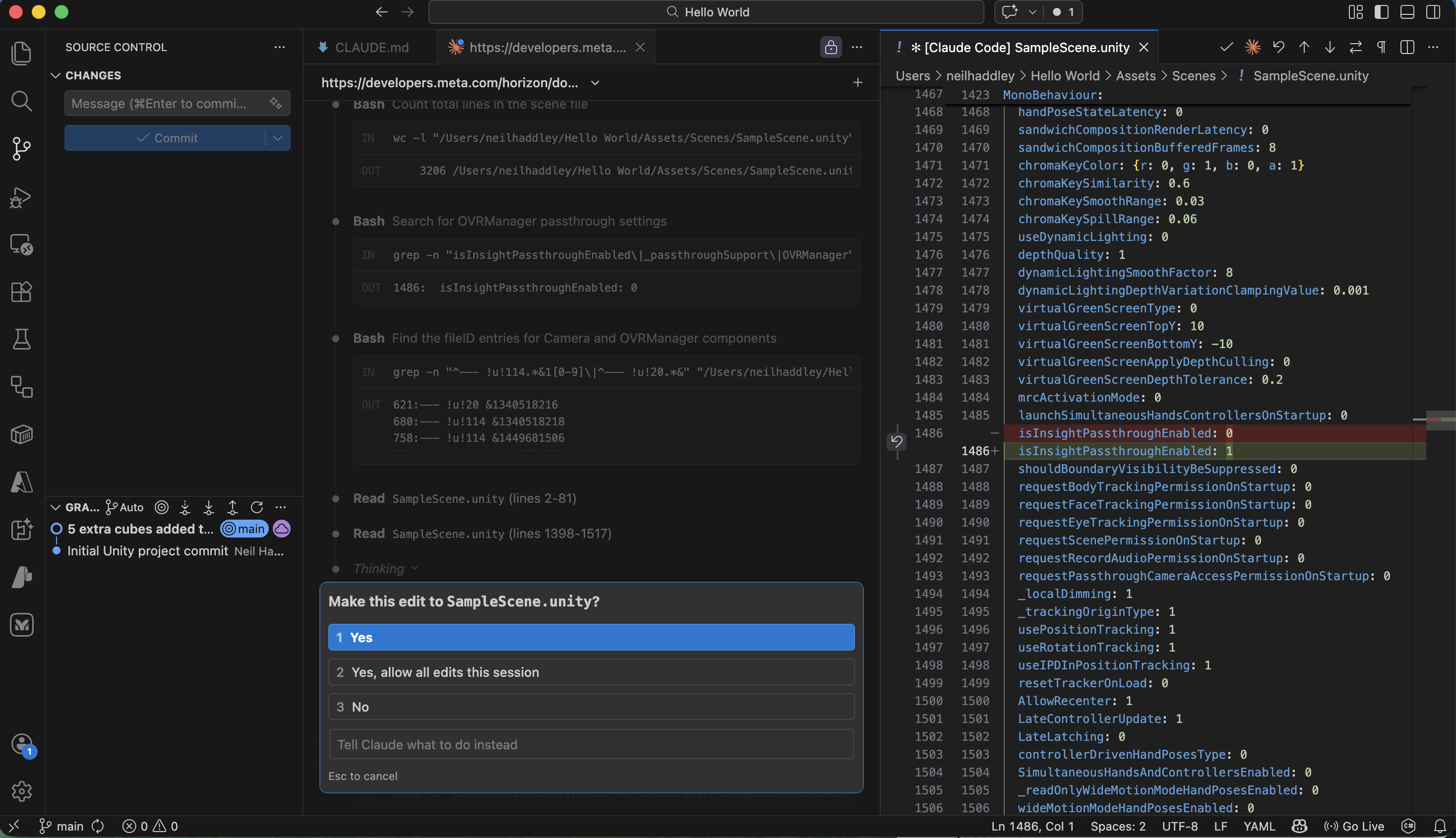
I clicked Yes to apply the first SampleScene.unity edit
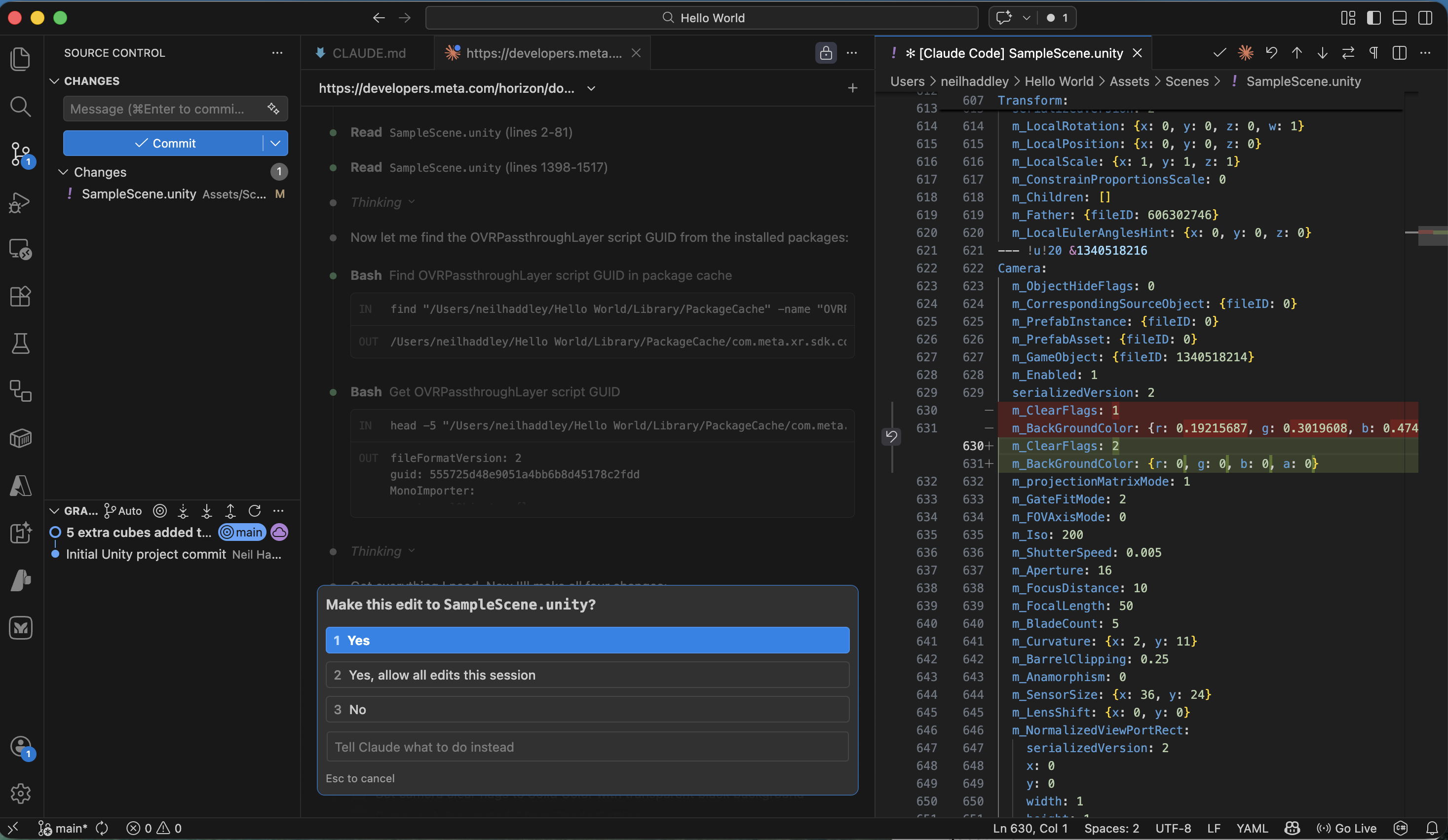
I clicked Yes to apply a second SampleScene.unity edit
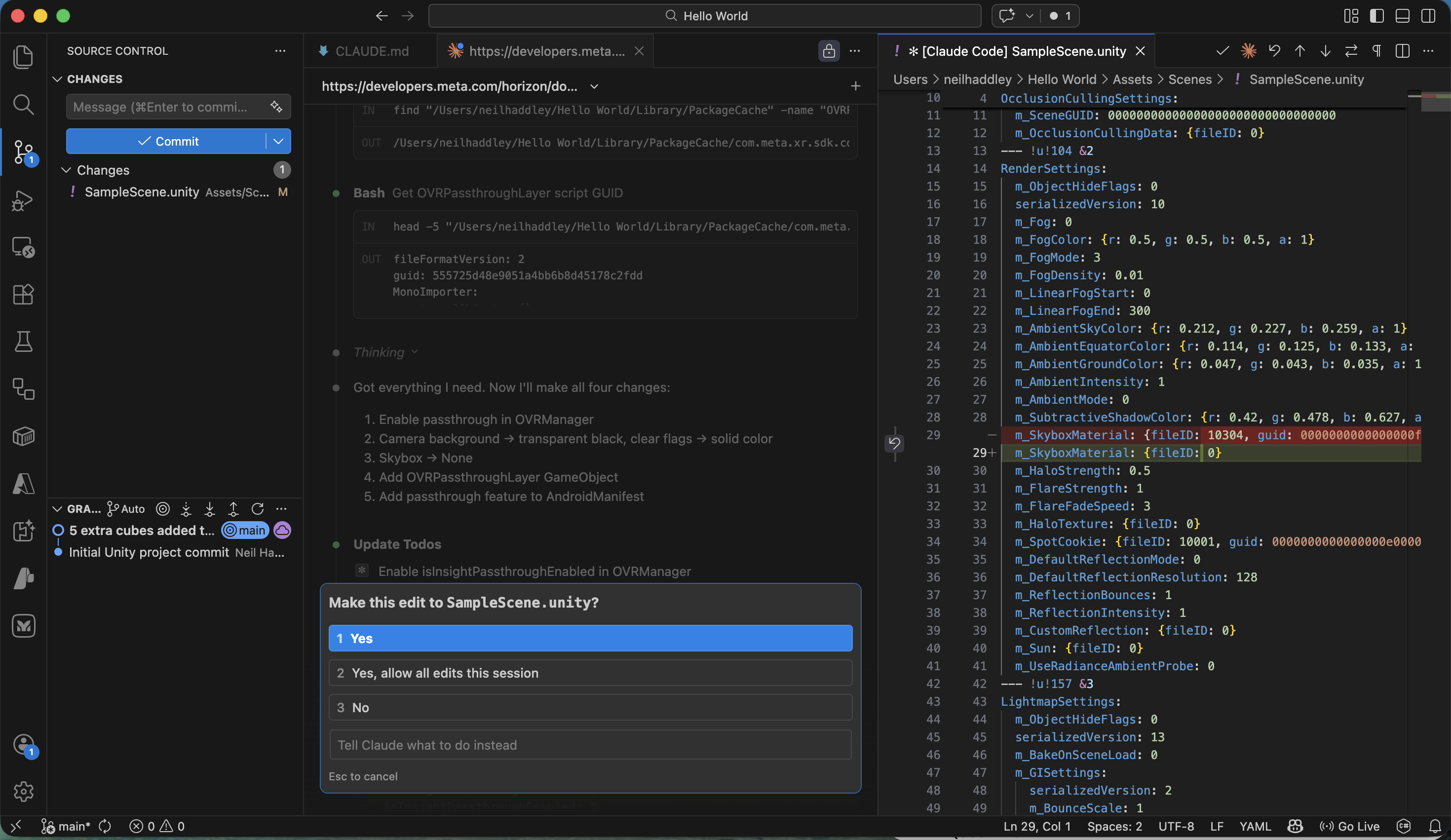
Claude Code planned the 4 changes needed to enable passthrough
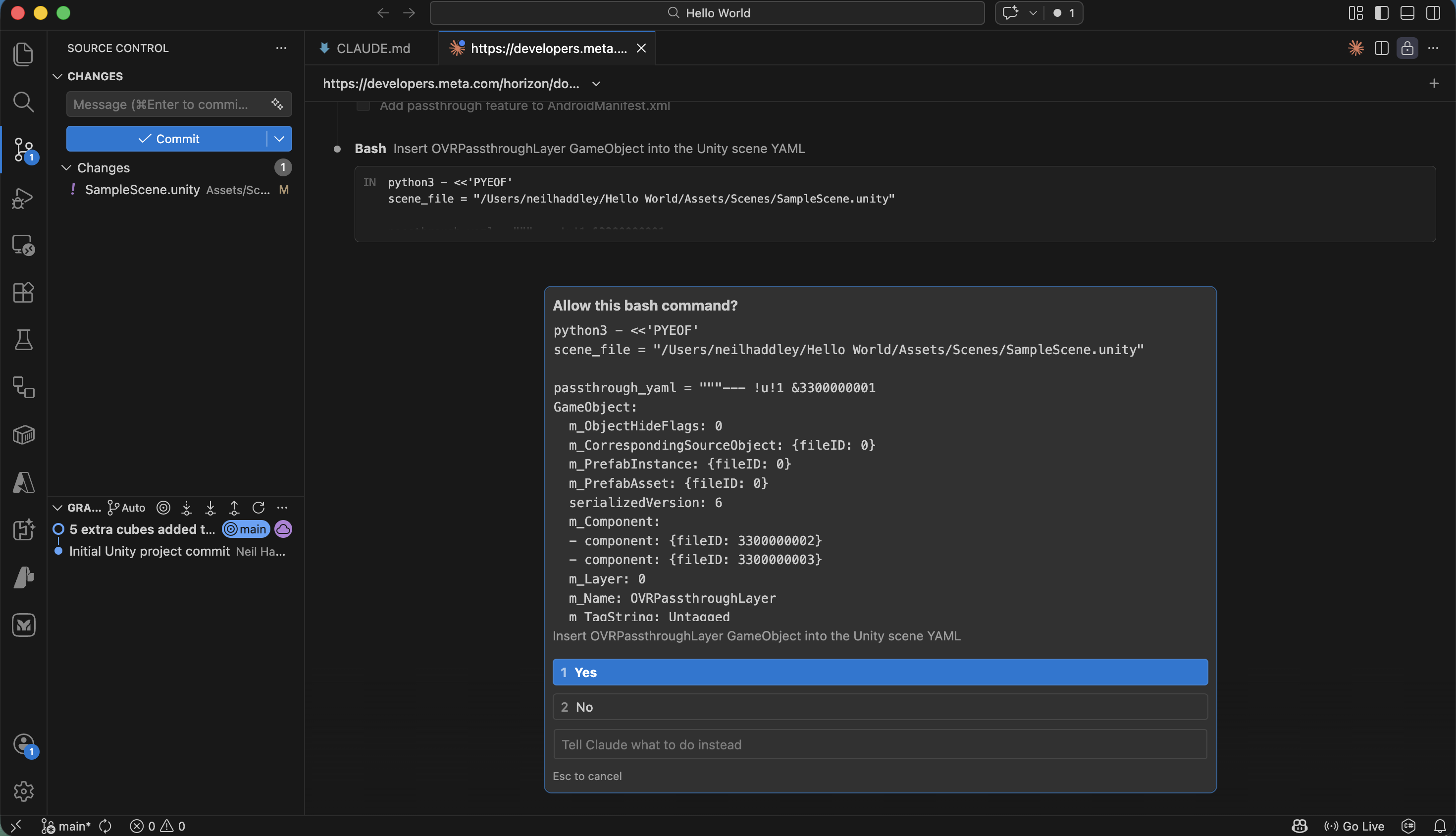
I clicked Yes to allow Claude Code to insert the OVRPassthroughLayer object into the scene
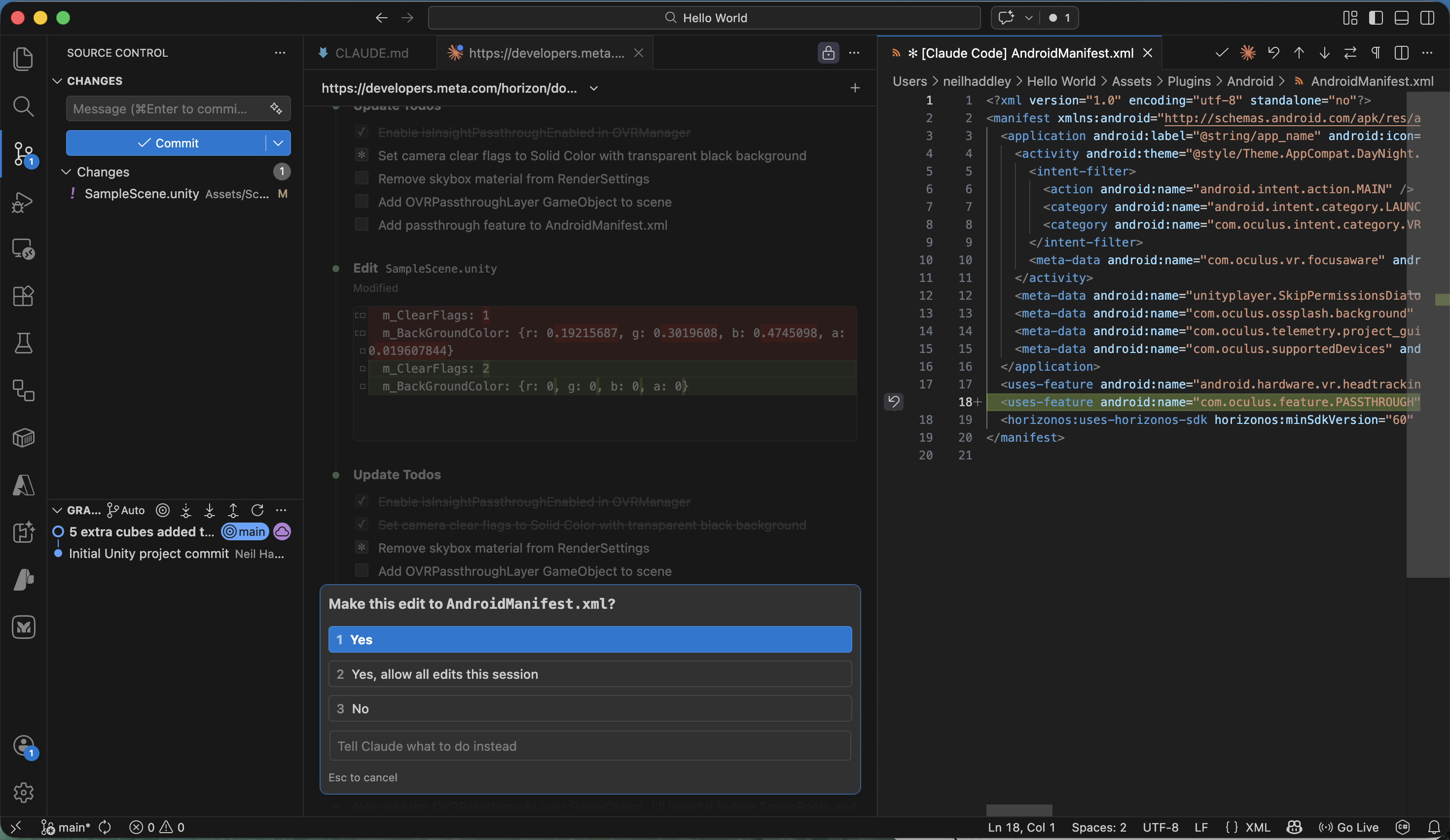
I clicked Yes to allow Claude Code to edit the AndroidManifest.xml
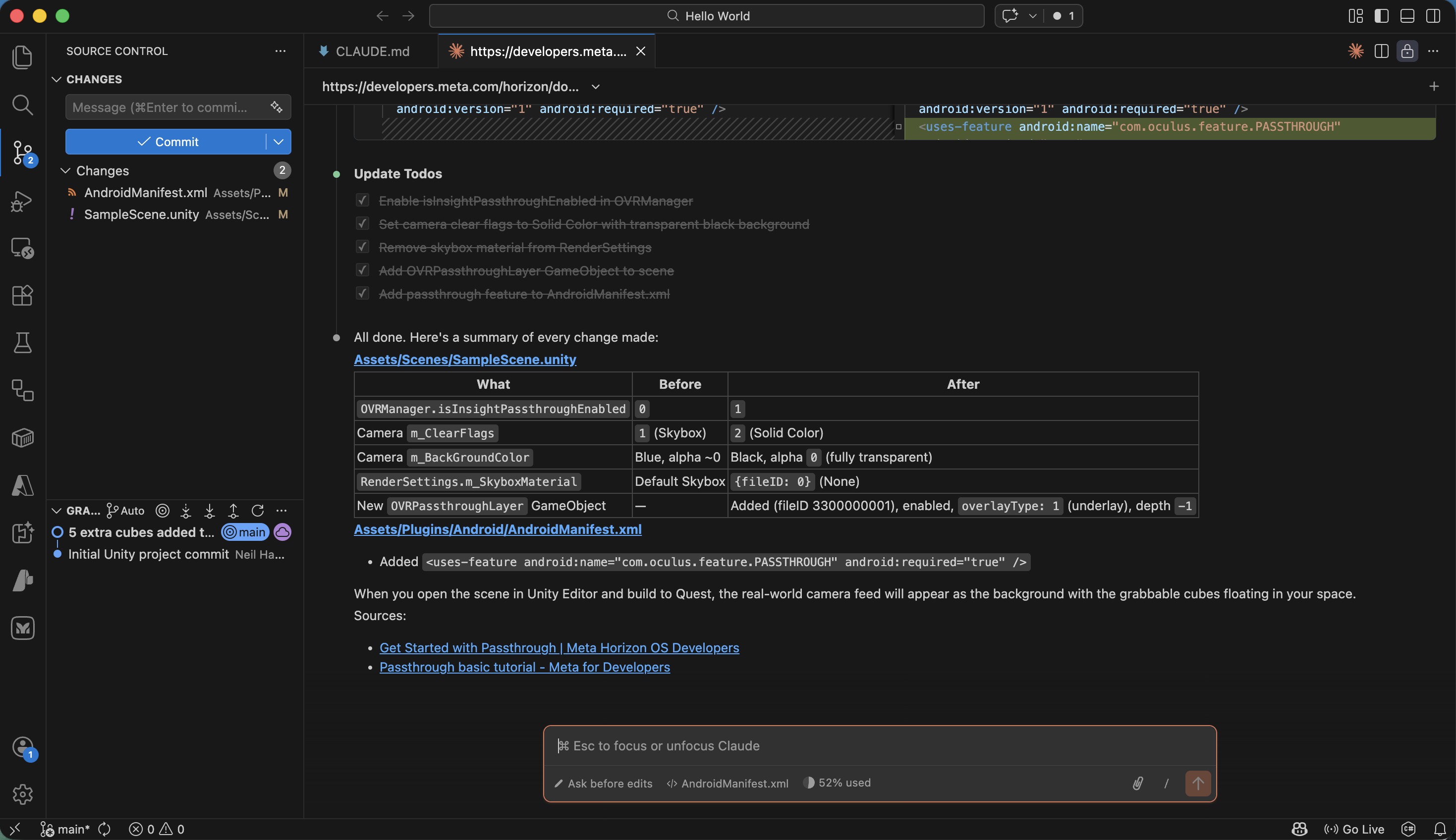
Claude Code completed all 4 passthrough changes and showed a summary

The passthrough view showed the real world with blue cubes floating in my space
Fixing my Vision with Claude Code
PROMPT
1I have been prescribed glasses that help me to see properly (without leaning my head towards my left shoulder) Add a feature that allows me to adjust the feed to my left and right eyes so that I am less tempted to lean my head. Show a spirit level that lets me see how horizontal my head/eye position is Here is the prescription Right Eye (OD): 5.50 Prism Diopters Base Down + 1.0 Prism Diopter Base Out. 2Left Eye (OS): 5.50 Prism Diopters Base Up + 1.0 Prism Diopter Base Out.
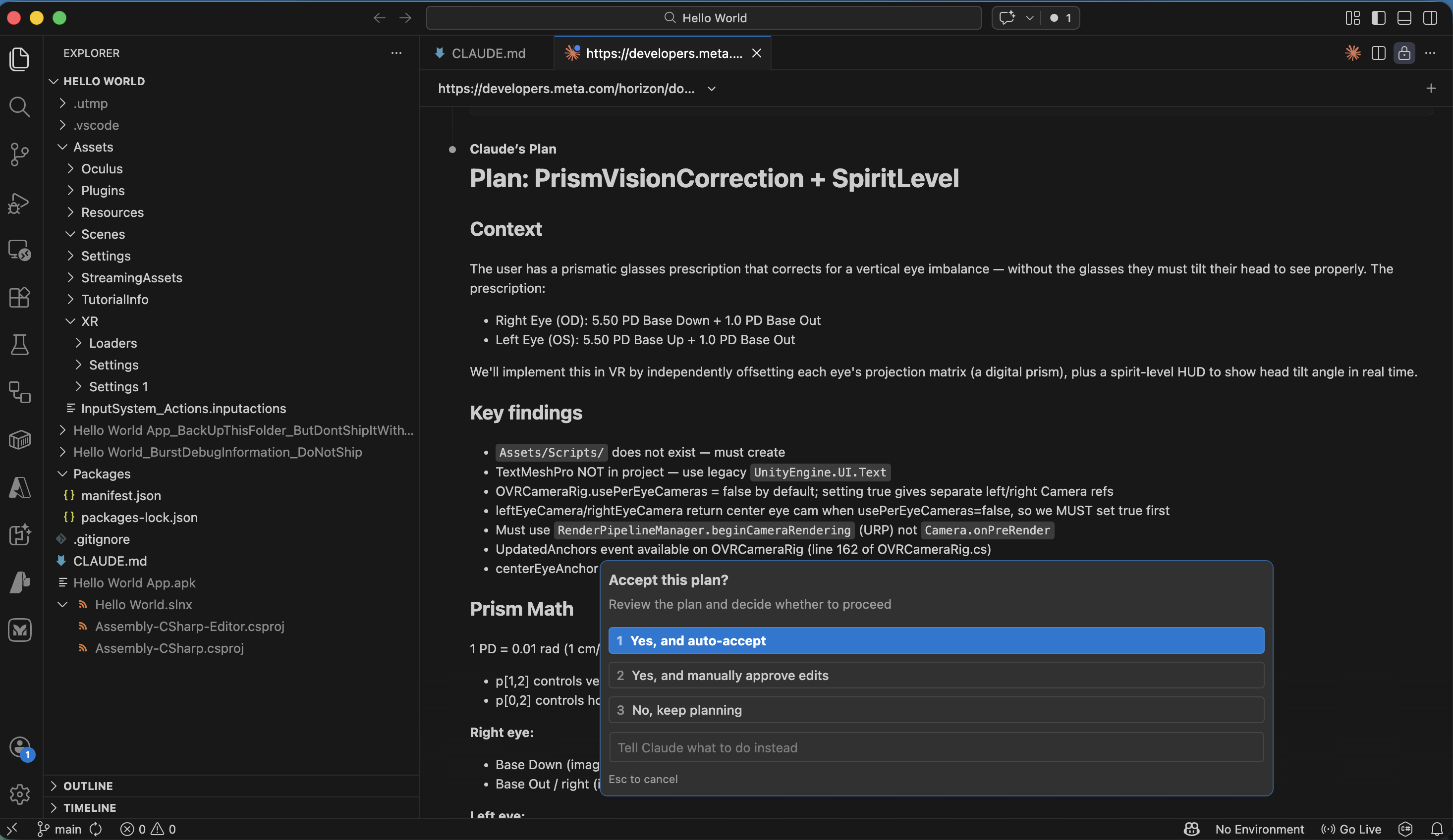
I reviewed Claude Code's plan for PrismVisionCorrection + SpiritLevel and selected Yes, and auto-accept
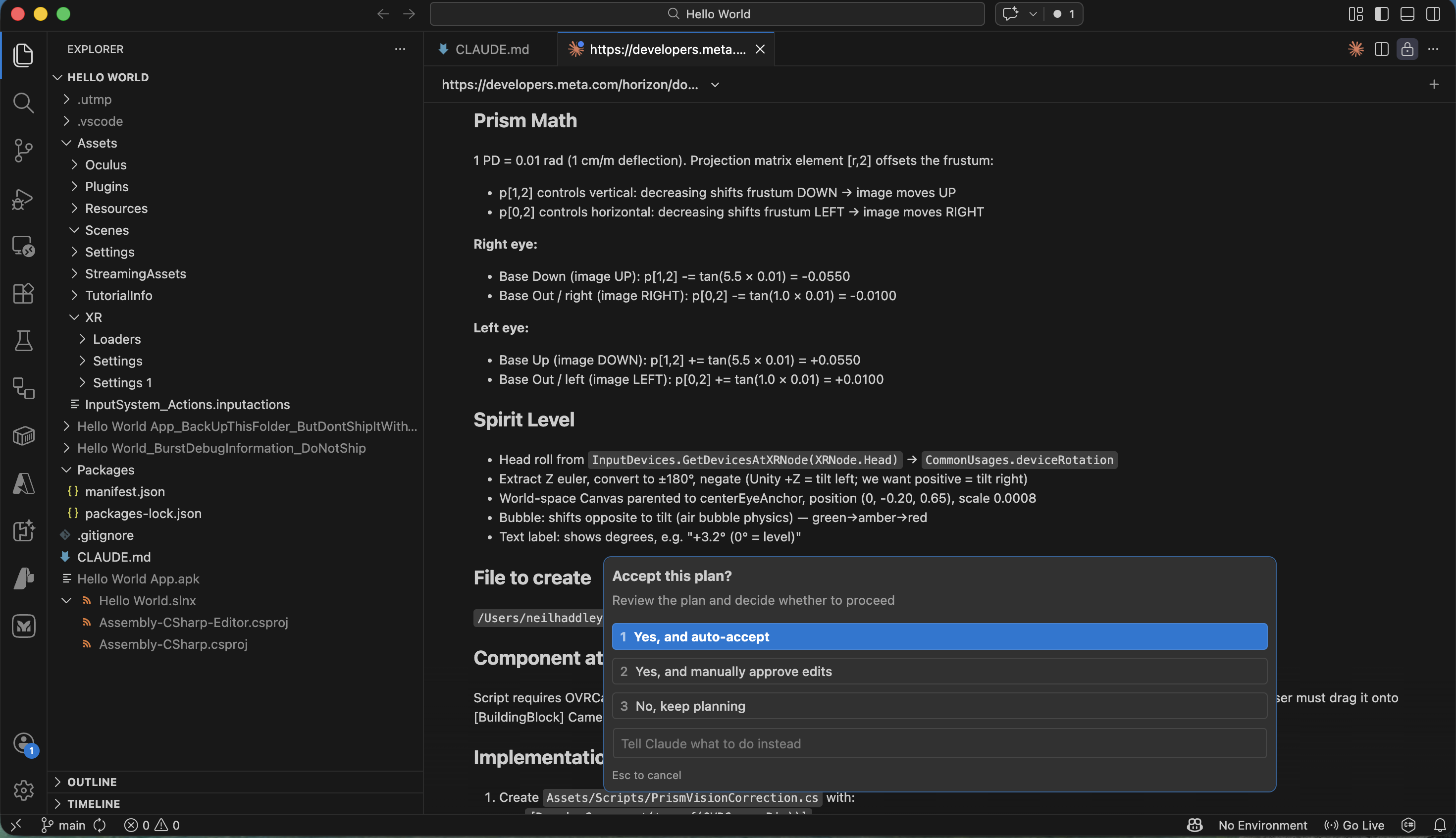
I reviewed the prism math and spirit level implementation details
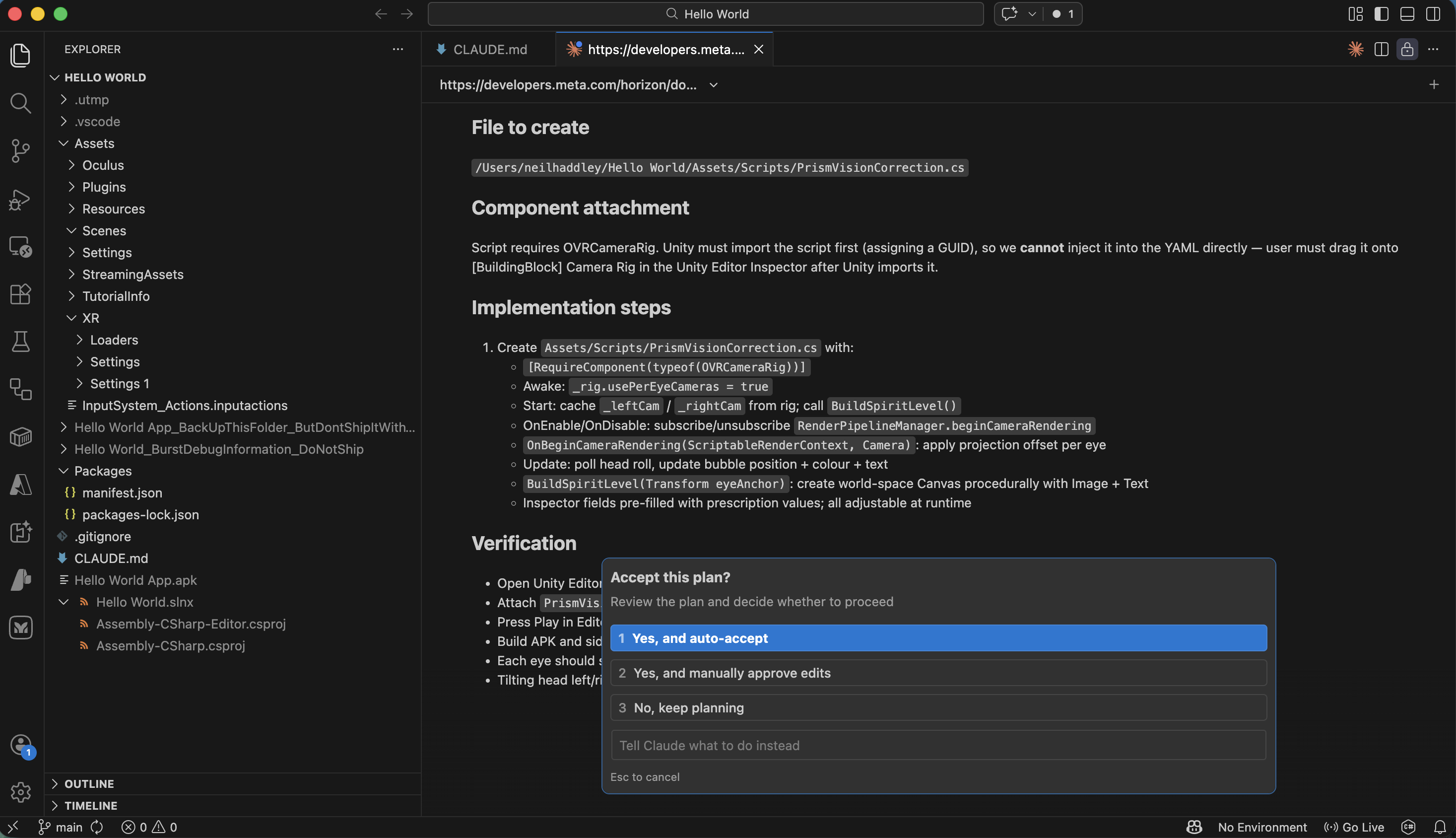
I reviewed the implementation steps and verification checklist
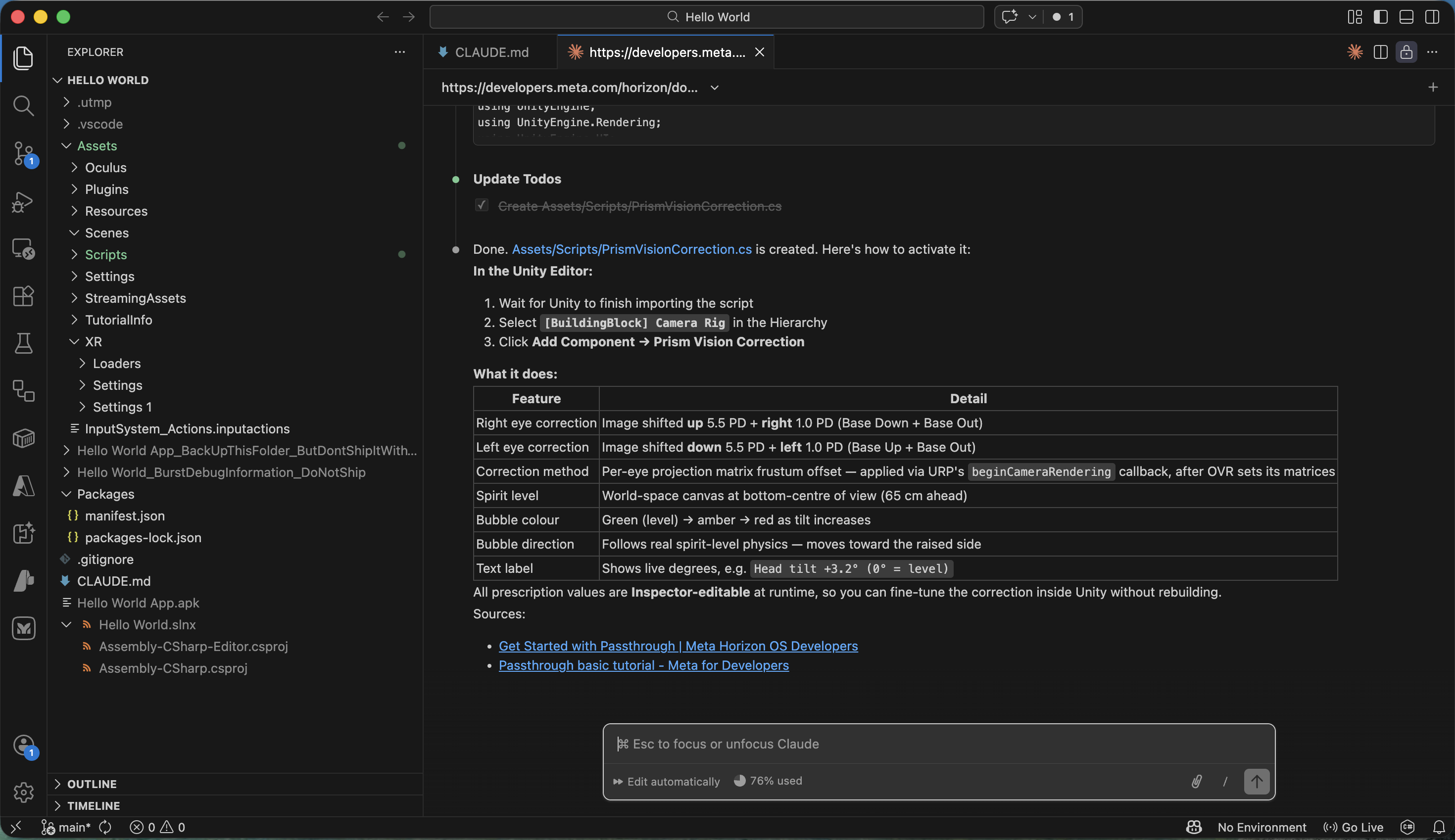
Claude Code completed the changes and summarised what was created
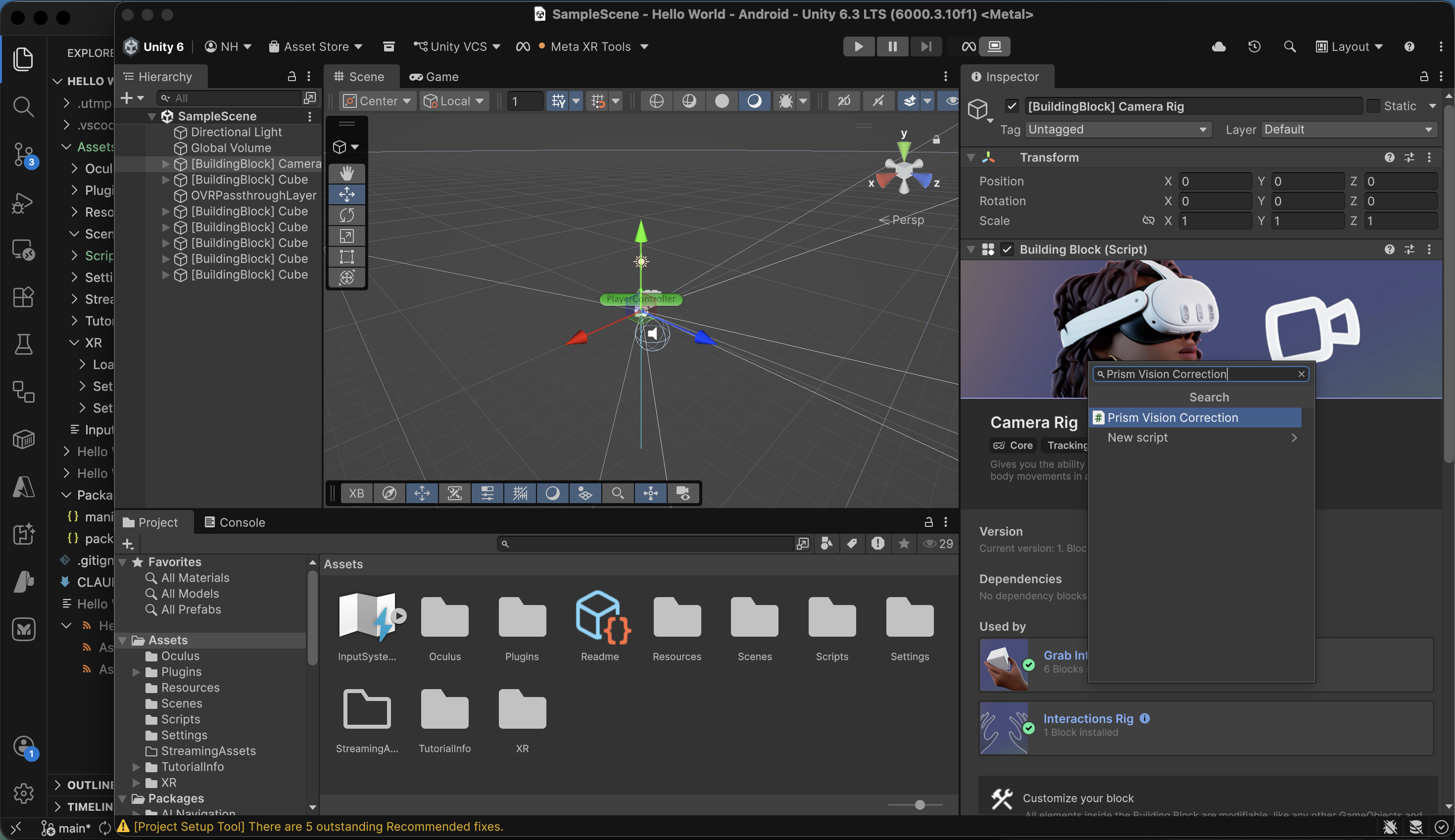
I attached the Prism Vision Correction script to the Camera Rig in the Unity Editor
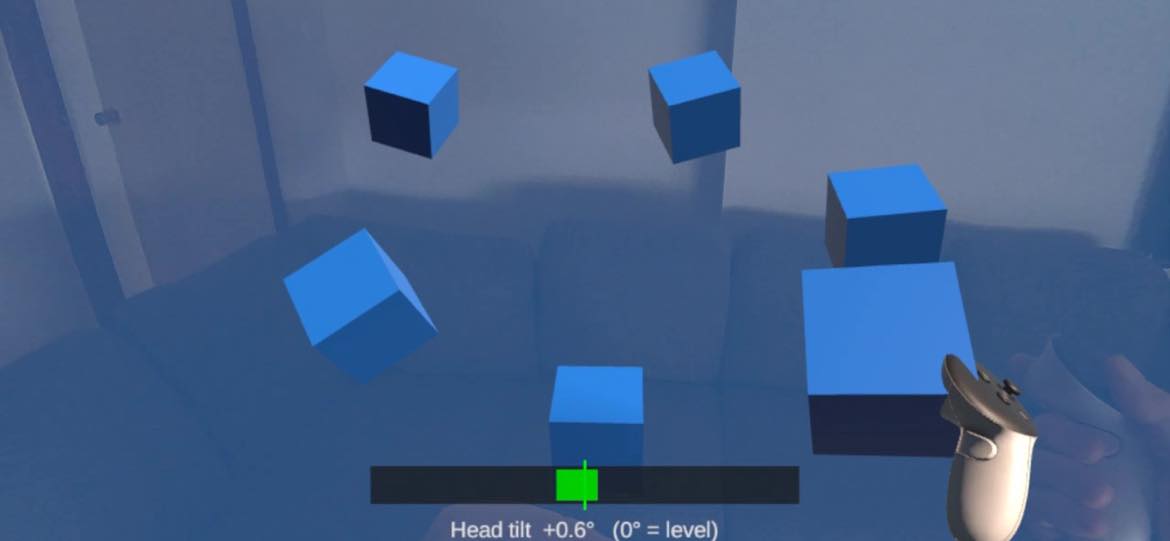
The spirit level at the bottom of the view showed my head tilt in real time
Understanding the Code
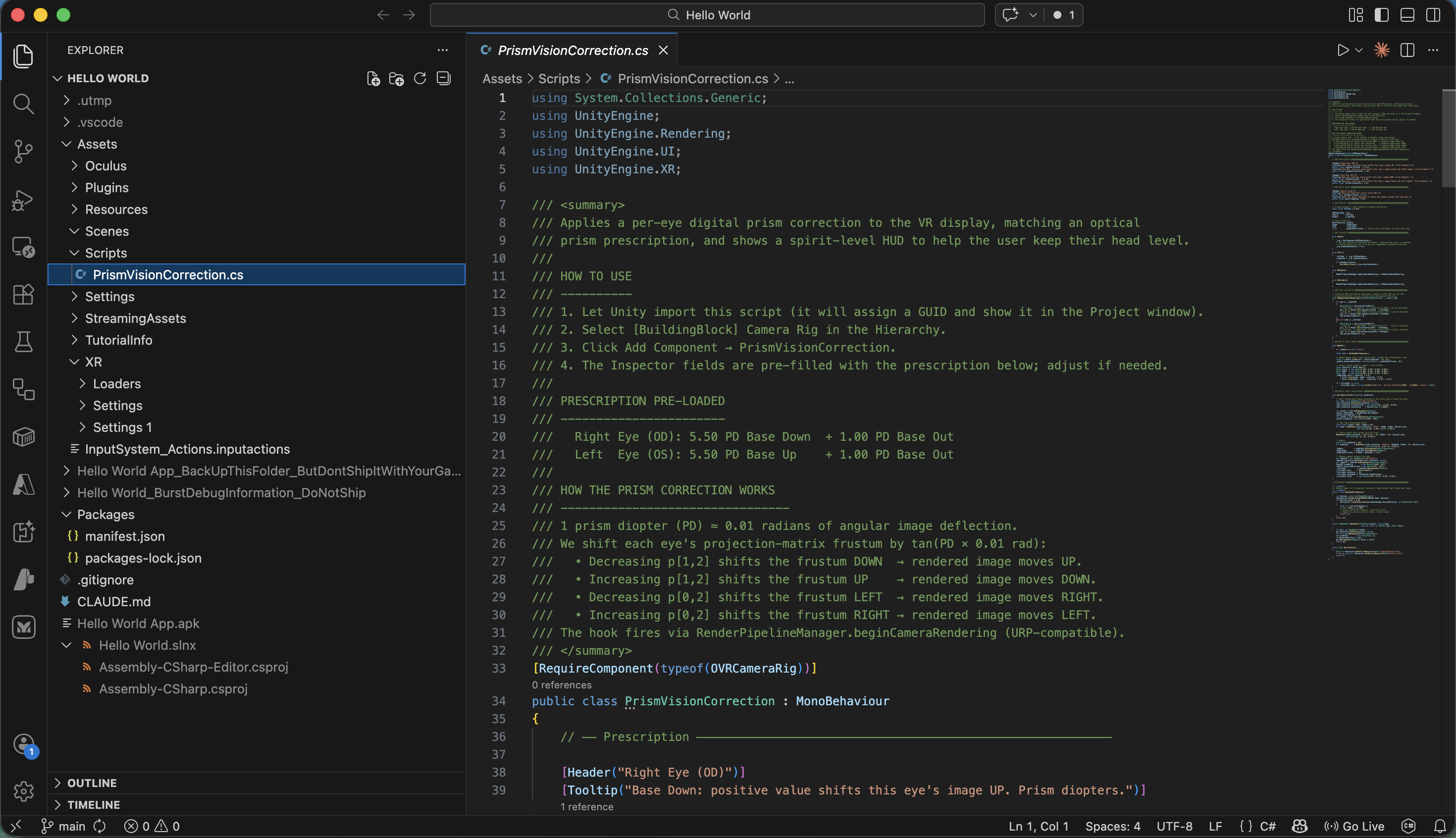
I opened PrismVisionCorrection.cs in VS Code
PROMPT
1explain PrismVisionCorrection.cs
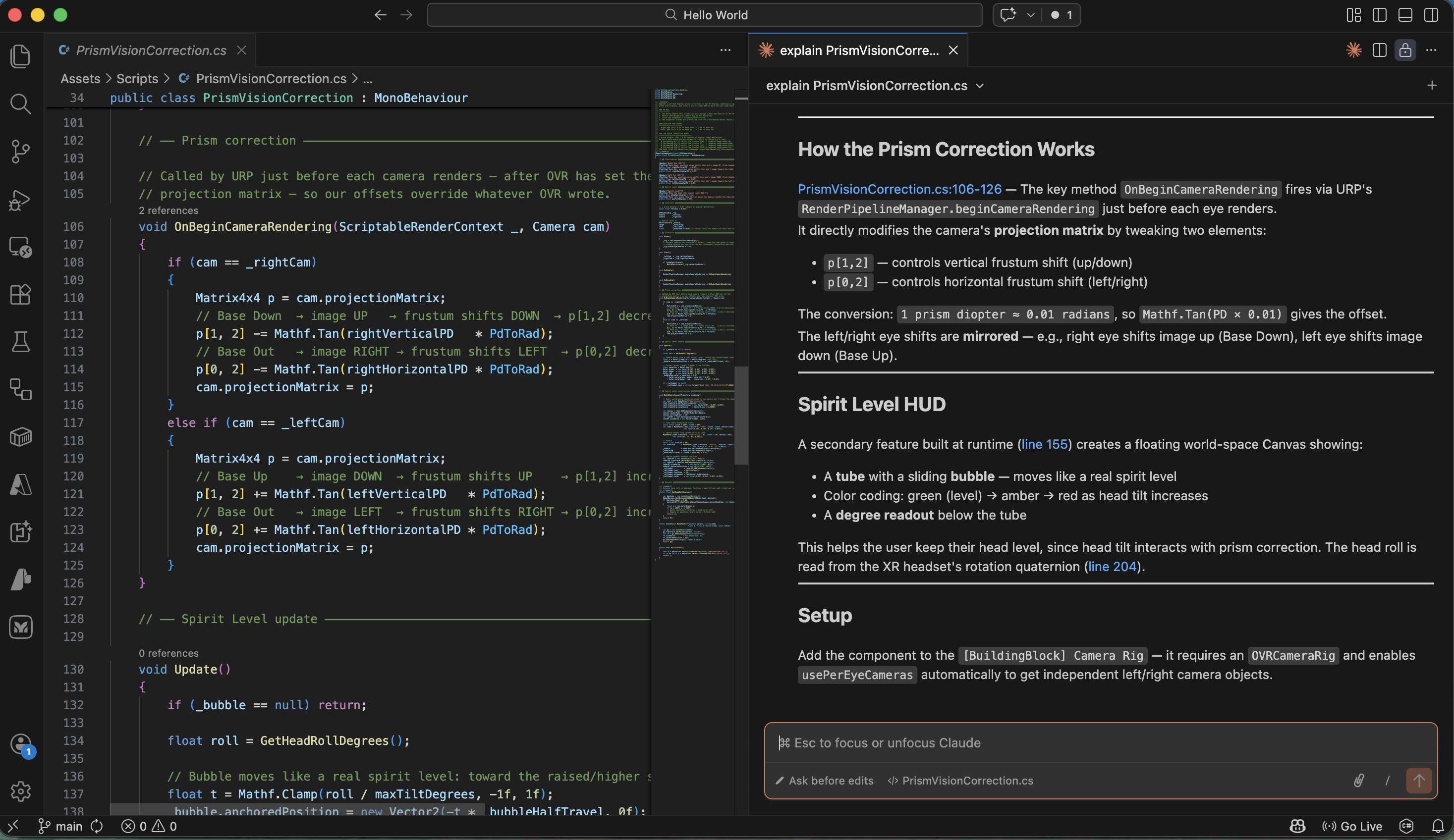
Claude Code explained how the prism correction and spirit level work
Dynamically adjusting Prism values
PROMPT
1Please update the PrismVisionCorrection script to include the following features: 2 31. Automatic Tilt Compensation 4 5The prism correction should adjust dynamically based on lateral head tilt (roll). 6When the head is level, the full horizontal and vertical prescription values are applied. 7Tilting toward the left shoulder gradually reduces the correction, reaching zero when the tilt reaches the compensationAngle (e.g., 16°). 8Tilting toward the right shoulder gradually increases the correction, reaching double the original prescription at the same angle. 9 102. More Robust Head‑Tilt Measurement 11 12Replace the current method for measuring head roll with a more reliable approach that accurately detects side‑to‑side tilt, even when the head is turned or angled up/down. 13The output should be positive for right tilt, negative for left tilt. 14 153. Enhanced HUD Display (Spirit Level) 16 17Slightly enlarge the HUD area: 18 19Line 1 (dim grey): Show the base prescription values (the original values from the prescription, or zero if the Y‑button reset has been used). 20Line 2 (light blue): Show the actual applied values after tilt adjustment, along with the current tilt scale factor, measured head tilt, and the compensationAngle. 21Both lines must update in real time as head movement occurs or prescription values are changed. 22 234. Quick Reset Buttons (Left Controller) 24 25Y button: Reset all four prism values (horizontal and vertical for both eyes) to zero. 26X button: Restore the original prescription values as they were set in the Inspector when the scene started. 27 28Do you have any questions?
Claude Code read the script and confirmed it had no questions before implementing all four features
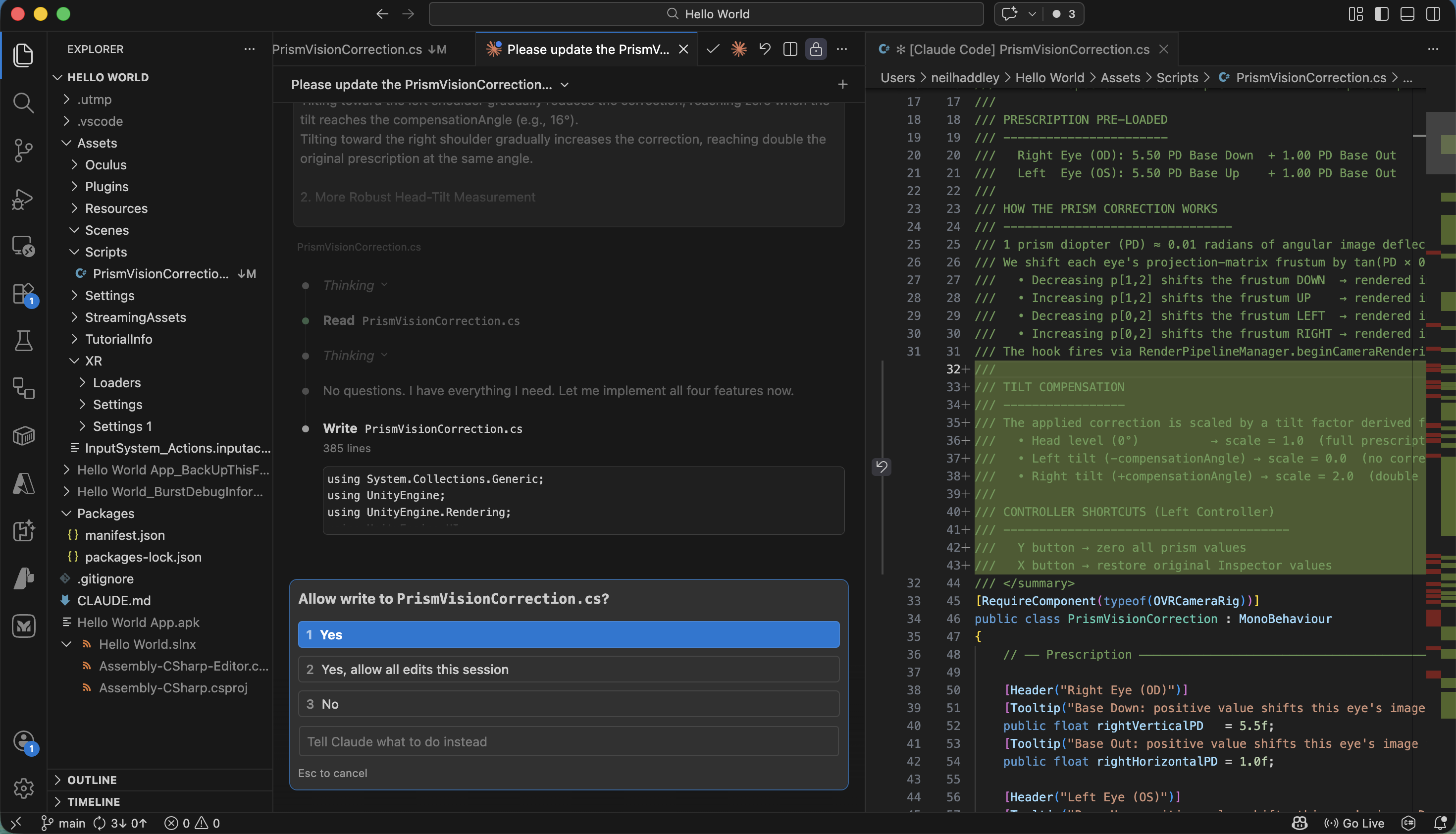
I clicked Yes to allow Claude Code to write the updated PrismVisionCorrection.cs
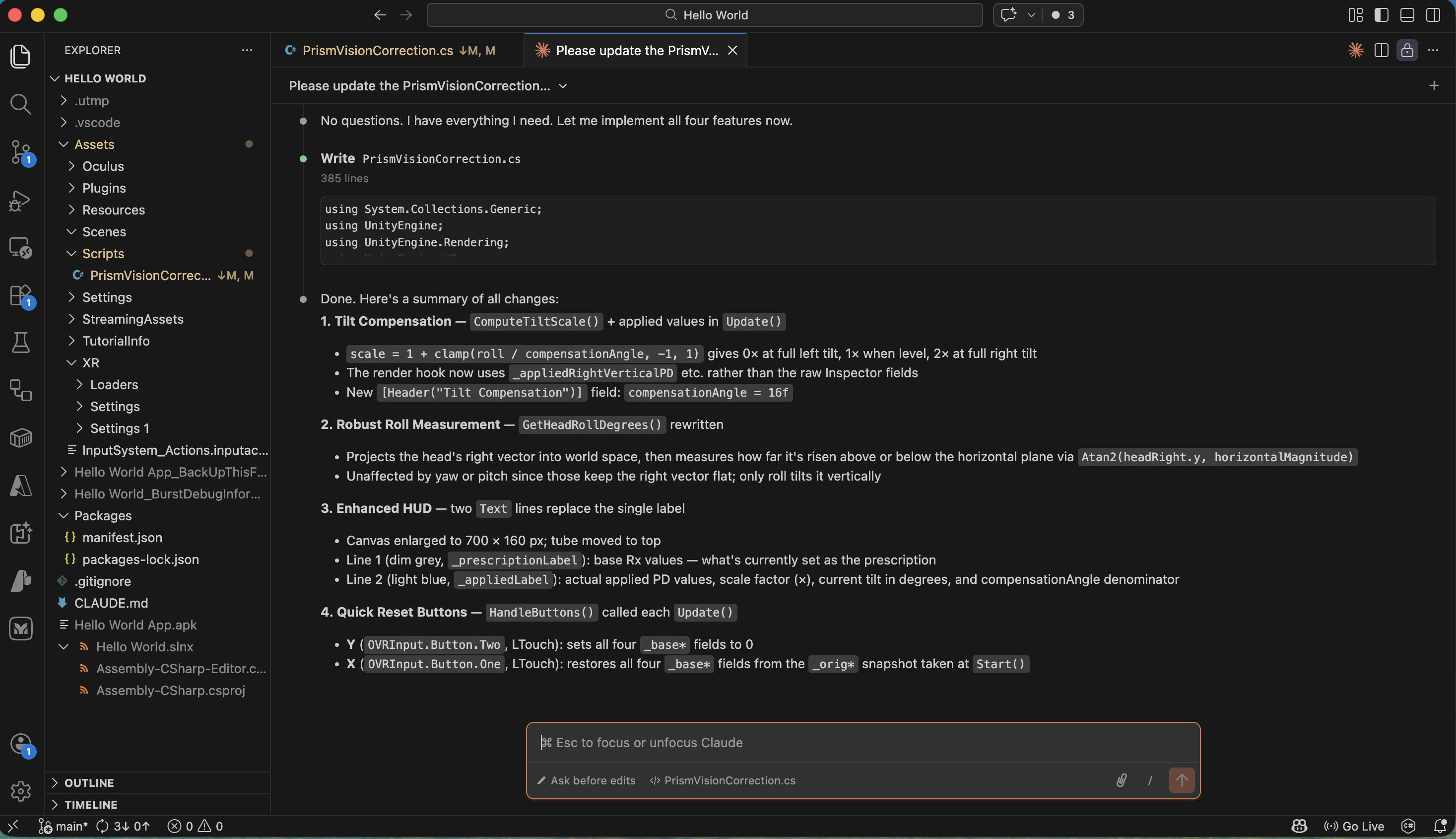
Claude Code completed all four changes and showed a summary of the tilt compensation, robust roll measurement, enhanced HUD, and quick reset buttons
CSHARP
1using UnityEngine; 2using UnityEngine.Rendering; 3using UnityEngine.UI; 4 5/// <summary> 6/// Applies a per-eye digital prism correction to the VR display, matching an optical 7/// prism prescription, and shows a spirit-level HUD to help the user keep their head level. 8/// 9/// HOW TO USE 10/// ---------- 11/// 1. Let Unity import this script (it will assign a GUID and show it in the Project window). 12/// 2. Select [BuildingBlock] Camera Rig in the Hierarchy. 13/// 3. Click Add Component → PrismVisionCorrection. 14/// 4. The Inspector fields are pre-filled with the prescription below; adjust if needed. 15/// 16/// PRESCRIPTION PRE-LOADED 17/// ----------------------- 18/// Right Eye (OD): 5.50 PD Base Down + 1.00 PD Base Out 19/// Left Eye (OS): 5.50 PD Base Up + 1.00 PD Base Out 20/// 21/// HOW THE PRISM CORRECTION WORKS 22/// -------------------------------- 23/// 1 prism diopter (PD) ≈ 0.01 radians of angular image deflection. 24/// We shift each eye's projection-matrix frustum by tan(PD × 0.01 rad): 25/// • Decreasing p[1,2] shifts the frustum DOWN → rendered image moves UP. 26/// • Increasing p[1,2] shifts the frustum UP → rendered image moves DOWN. 27/// • Decreasing p[0,2] shifts the frustum LEFT → rendered image moves RIGHT. 28/// • Increasing p[0,2] shifts the frustum RIGHT → rendered image moves LEFT. 29/// The hook fires via RenderPipelineManager.beginCameraRendering (URP-compatible). 30/// 31/// TILT COMPENSATION 32/// ----------------- 33/// The applied correction is scaled by a tilt factor derived from head roll: 34/// • Head level (0°) → scale = 1.0 (full prescription) 35/// • Left tilt (−compensationAngle) → scale = 0.0 (no correction) 36/// • Right tilt (+compensationAngle) → scale = 2.0 (double correction) 37/// 38/// CONTROLLER SHORTCUTS (Left Controller) 39/// ---------------------------------------- 40/// Y button → zero all prism values 41/// X button → restore original Inspector values 42/// </summary> 43[RequireComponent(typeof(OVRCameraRig))] 44public class PrismVisionCorrection : MonoBehaviour 45{ 46 // ── Prescription ────────────────────────────────────────────────────────── 47 48 [Header("Right Eye (OD)")] 49 [Tooltip("Base Down: positive value shifts this eye's image UP. Prism diopters.")] 50 public float rightVerticalPD = 5.5f; 51 [Tooltip("Base Out: positive value shifts this eye's image toward the right temple. Prism diopters.")] 52 public float rightHorizontalPD = 1.0f; 53 54 [Header("Left Eye (OS)")] 55 [Tooltip("Base Up: positive value shifts this eye's image DOWN. Prism diopters.")] 56 public float leftVerticalPD = 5.5f; 57 [Tooltip("Base Out: positive value shifts this eye's image toward the left temple. Prism diopters.")] 58 public float leftHorizontalPD = 1.0f; 59 60 // ── Spirit Level ────────────────────────────────────────────────────────── 61 62 [Header("Spirit Level")] 63 [Tooltip("Show the head-tilt spirit level HUD.")] 64 public bool showSpiritLevel = true; 65 [Tooltip("Head roll angle (degrees) at which the bubble reaches the tube end.")] 66 public float maxTiltDegrees = 15f; 67 68 // ── Tilt Compensation ───────────────────────────────────────────────────── 69 70 [Header("Tilt Compensation")] 71 [Tooltip("Degrees of LEFT-shoulder tilt at which the applied correction falls to zero.\n" + 72 "Set to 0 to disable (full prescription always applied).\n" + 73 "Example: 16 means at 16° left tilt the correction is 0, at 0° it is full,\n" + 74 "at 16° right tilt it is doubled.")] 75 public float compensationAngle = 16f; 76 77 // ── Internals ───────────────────────────────────────────────────────────── 78 79 // 1 prism diopter ≈ 0.01 radians of angular deflection. 80 const float PdToRad = 0.01f; 81 82 OVRCameraRig _rig; 83 Camera _leftCam; 84 Camera _rightCam; 85 86 // Snapshot of Inspector values taken at Awake (restored by X button). 87 float _defaultRightVerticalPD; 88 float _defaultRightHorizontalPD; 89 float _defaultLeftVerticalPD; 90 float _defaultLeftHorizontalPD; 91 92 // Tilt-scaled applied values — written by Update(), read by OnBeginCameraRendering. 93 float _appliedRightVerticalPD; 94 float _appliedRightHorizontalPD; 95 float _appliedLeftVerticalPD; 96 float _appliedLeftHorizontalPD; 97 98 // Spirit level UI 99 RectTransform _bubble; 100 Image _bubbleImg; 101 Text _prescriptionLabel; // Line 1: current prescription (dim grey) 102 Text _appliedLabel; // Line 2: applied values + tilt info (light blue) 103 float _bubbleHalfTravel; // canvas units the bubble can move each side 104 105 // ── Lifecycle ───────────────────────────────────────────────────────────── 106 107 void Awake() 108 { 109 _rig = GetComponent<OVRCameraRig>(); 110 // Per-eye cameras are disabled by default. Enabling them gives us separate 111 // Camera objects per eye so we can set independent projection matrices. 112 _rig.usePerEyeCameras = true; 113 114 // Guard against the scene having serialized compensationAngle as 0 before 115 // the field existed (Unity keeps old serialized values even when the code 116 // default changes, so this ensures the feature is always active). 117 if (compensationAngle == 0f) compensationAngle = 16f; 118 119 // Snapshot Inspector values so X can always restore them. 120 _defaultRightVerticalPD = rightVerticalPD; 121 _defaultRightHorizontalPD = rightHorizontalPD; 122 _defaultLeftVerticalPD = leftVerticalPD; 123 _defaultLeftHorizontalPD = leftHorizontalPD; 124 } 125 126 void Start() 127 { 128 _leftCam = _rig.leftEyeCamera; 129 _rightCam = _rig.rightEyeCamera; 130 131 // When usePerEyeCameras is true the per-eye cameras are created fresh and 132 // do not inherit the centre eye's passthrough clear settings. Without this 133 // the cameras render a solid (blue) background instead of compositing over 134 // the passthrough layer. 135 ConfigurePassthroughCamera(_leftCam); 136 ConfigurePassthroughCamera(_rightCam); 137 138 // Seed applied values so the first frame renders correctly before Update runs. 139 UpdateAppliedValues(1f); 140 141 if (showSpiritLevel) 142 BuildSpiritLevel(_rig.centerEyeAnchor); 143 } 144 145 static void ConfigurePassthroughCamera(Camera cam) 146 { 147 if (cam == null) return; 148 cam.clearFlags = CameraClearFlags.SolidColor; 149 cam.backgroundColor = Color.clear; // alpha = 0 → passthrough shows through 150 } 151 152 void OnEnable() 153 { 154 RenderPipelineManager.beginCameraRendering += OnBeginCameraRendering; 155 } 156 157 void OnDisable() 158 { 159 RenderPipelineManager.beginCameraRendering -= OnBeginCameraRendering; 160 } 161 162 // ── Prism correction ────────────────────────────────────────────────────── 163 164 // Called by URP just before each camera renders — after OVR has set the 165 // projection matrix — so our offsets override whatever OVR wrote. 166 void OnBeginCameraRendering(ScriptableRenderContext _, Camera cam) 167 { 168 if (cam == _rightCam) 169 { 170 Matrix4x4 p = cam.projectionMatrix; 171 // Base Down → image UP → frustum shifts DOWN → p[1,2] decreases 172 p[1, 2] -= Mathf.Tan(_appliedRightVerticalPD * PdToRad); 173 // Base Out → image RIGHT → frustum shifts LEFT → p[0,2] decreases 174 p[0, 2] -= Mathf.Tan(_appliedRightHorizontalPD * PdToRad); 175 cam.projectionMatrix = p; 176 } 177 else if (cam == _leftCam) 178 { 179 Matrix4x4 p = cam.projectionMatrix; 180 // Base Up → image DOWN → frustum shifts UP → p[1,2] increases 181 p[1, 2] += Mathf.Tan(_appliedLeftVerticalPD * PdToRad); 182 // Base Out → image LEFT → frustum shifts RIGHT → p[0,2] increases 183 p[0, 2] += Mathf.Tan(_appliedLeftHorizontalPD * PdToRad); 184 cam.projectionMatrix = p; 185 } 186 } 187 188 // ── Update ──────────────────────────────────────────────────────────────── 189 190 void Update() 191 { 192 // ── Quick reset buttons ─────────────────────────────────────────────── 193 // Y → zero prescription X → restore Inspector defaults 194 if (OVRInput.GetDown(OVRInput.Button.Four)) // Y (left controller) 195 { 196 rightVerticalPD = rightHorizontalPD = leftVerticalPD = leftHorizontalPD = 0f; 197 } 198 else if (OVRInput.GetDown(OVRInput.Button.Three)) // X (left controller) 199 { 200 rightVerticalPD = _defaultRightVerticalPD; 201 rightHorizontalPD = _defaultRightHorizontalPD; 202 leftVerticalPD = _defaultLeftVerticalPD; 203 leftHorizontalPD = _defaultLeftHorizontalPD; 204 } 205 206 // ── Tilt compensation ───────────────────────────────────────────────── 207 // scale = 1 + roll / compensationAngle 208 // roll = 0 → scale = 1.0 → full prescription 209 // roll = −compensationAngle → scale = 0.0 → no correction 210 // roll = +compensationAngle → scale = 2.0 → doubled 211 float roll = GetHeadRollDegrees(); 212 float tiltScale = Mathf.Abs(compensationAngle) > 0.01f 213 ? Mathf.Max(0f, 1f + roll / compensationAngle) 214 : 1f; 215 UpdateAppliedValues(tiltScale); 216 217 if (_bubble == null) return; 218 219 // ── Spirit level bubble ─────────────────────────────────────────────── 220 float t = Mathf.Clamp(roll / maxTiltDegrees, -1f, 1f); 221 _bubble.anchoredPosition = new Vector2(-t * _bubbleHalfTravel, 0f); 222 223 // Colour: green (level) → amber → red (tilted). 224 float severity = Mathf.Abs(t); 225 Color green = new Color(0.10f, 0.85f, 0.25f, 0.90f); 226 Color amber = new Color(1.00f, 0.65f, 0.00f, 0.90f); 227 Color red = new Color(0.90f, 0.15f, 0.15f, 0.90f); 228 _bubbleImg.color = severity < 0.4f 229 ? Color.Lerp(green, amber, severity / 0.4f) 230 : Color.Lerp(amber, red, (severity - 0.4f) / 0.6f); 231 232 // ── HUD labels ──────────────────────────────────────────────────────── 233 234 // Line 1: current prescription (dim grey). 235 if (_prescriptionLabel != null) 236 _prescriptionLabel.text = string.Format( 237 "Rx RV:{0:+0.00;-0.00;0.00} RH:{1:+0.00;-0.00;0.00} LV:{2:+0.00;-0.00;0.00} LH:{3:+0.00;-0.00;0.00}", 238 rightVerticalPD, rightHorizontalPD, 239 leftVerticalPD, leftHorizontalPD); 240 241 // Line 2: applied values + tilt diagnostics (light blue). 242 if (_appliedLabel != null) 243 _appliedLabel.text = string.Format( 244 "Applied RV:{0:+0.00;-0.00;0.00} RH:{1:+0.00;-0.00;0.00} LV:{2:+0.00;-0.00;0.00} LH:{3:+0.00;-0.00;0.00} \u00d7{4:0.00} tilt:{5:+0.0;-0.0;0.0}\u00b0/{6:0}\u00b0", 245 _appliedRightVerticalPD, _appliedRightHorizontalPD, 246 _appliedLeftVerticalPD, _appliedLeftHorizontalPD, 247 tiltScale, roll, compensationAngle); 248 } 249 250 void UpdateAppliedValues(float scale) 251 { 252 _appliedRightVerticalPD = rightVerticalPD * scale; 253 _appliedRightHorizontalPD = rightHorizontalPD * scale; 254 _appliedLeftVerticalPD = leftVerticalPD * scale; 255 _appliedLeftHorizontalPD = leftHorizontalPD * scale; 256 } 257 258 // ── Spirit Level construction ───────────────────────────────────────────── 259 260 void BuildSpiritLevel(Transform eyeAnchor) 261 { 262 // Root: world-space Canvas parented to the centre eye — tracks the head. 263 var root = new GameObject("SpiritLevel"); 264 root.transform.SetParent(eyeAnchor, false); 265 root.transform.localPosition = new Vector3(0f, -0.20f, 0.65f); 266 root.transform.localScale = Vector3.one * 0.0008f; 267 268 var canvas = root.AddComponent<Canvas>(); 269 canvas.renderMode = RenderMode.WorldSpace; 270 canvas.sortingOrder = 10; 271 var rootRT = root.GetComponent<RectTransform>(); 272 rootRT.sizeDelta = new Vector2(700f, 160f); 273 274 var font = BuiltinFont(); 275 276 // Tube (dark background track) — positioned toward the top of the canvas. 277 const float TubeW = 660f, TubeH = 44f; 278 var tube = MakePanel(root.transform, "Tube", TubeW, TubeH, 279 new Vector2(0f, 42f), 280 new Color(0.10f, 0.10f, 0.12f, 0.88f)); 281 282 // Centre target tick (green vertical line). 283 MakePanel(tube.transform, "CentreTick", 3f, TubeH + 14f, Vector2.zero, 284 new Color(0f, 1f, 0f, 0.95f)); 285 286 // Bubble. 287 const float BubbleW = 48f; 288 var bubbleGO = MakePanel(tube.transform, "Bubble", BubbleW, TubeH - 8f, Vector2.zero, 289 new Color(0.2f, 0.8f, 1f, 0.90f)); 290 _bubble = bubbleGO.GetComponent<RectTransform>(); 291 _bubbleImg = bubbleGO.GetComponent<Image>(); 292 _bubbleHalfTravel = (TubeW - BubbleW) * 0.5f; 293 294 // Line 1: current prescription (dim grey). 295 _prescriptionLabel = MakeLabel(root.transform, "PrescriptionLabel", 296 700f, 36f, new Vector2(0f, -4f), 297 font, 22, new Color(0.55f, 0.55f, 0.55f, 0.90f)); 298 299 // Line 2: applied values + tilt info (light blue). 300 _appliedLabel = MakeLabel(root.transform, "AppliedLabel", 301 700f, 36f, new Vector2(0f, -44f), 302 font, 22, new Color(0.45f, 0.80f, 1.00f, 0.95f)); 303 } 304 305 // ── Helpers ─────────────────────────────────────────────────────────────── 306 307 /// <summary> 308 /// Returns head roll in degrees. Positive = head tilted right (right ear lower). 309 /// Measures rotation around the head's own forward (look) axis so it is immune to 310 /// pitch, yaw, and tracking-space orientation. 311 /// </summary> 312 float GetHeadRollDegrees() 313 { 314 if (_rig == null) return 0f; 315 Transform head = _rig.centerEyeAnchor; 316 Vector3 fwd = head.forward; 317 // Project gravity-up onto the plane perpendicular to the look direction. 318 // This gives the "level" reference up at the current yaw and pitch. 319 Vector3 refUp = Vector3.ProjectOnPlane(Vector3.up, fwd).normalized; 320 if (refUp.sqrMagnitude < 0.001f) return 0f; // looking straight up or down 321 // Signed angle from the gravity reference to the actual head up, rotating 322 // around the look axis. Negative because right-hand rule around +forward 323 // gives a clockwise (left-tilt) positive result; we invert to match the 324 // convention that positive = right tilt. 325 return -Vector3.SignedAngle(refUp, head.up, fwd); 326 } 327 328 static Text MakeLabel(Transform parent, string name, 329 float w, float h, Vector2 pos, 330 Font font, int fontSize, Color color) 331 { 332 var go = new GameObject(name); 333 go.transform.SetParent(parent, false); 334 var rt = go.AddComponent<RectTransform>(); 335 rt.sizeDelta = new Vector2(w, h); 336 rt.anchoredPosition = pos; 337 var txt = go.AddComponent<Text>(); 338 txt.font = font; 339 txt.fontSize = fontSize; 340 txt.alignment = TextAnchor.MiddleCenter; 341 txt.color = color; 342 return txt; 343 } 344 345 static GameObject MakePanel(Transform parent, string name, 346 float w, float h, Vector2 pos, Color color) 347 { 348 var go = new GameObject(name); 349 go.transform.SetParent(parent, false); 350 var rt = go.AddComponent<RectTransform>(); 351 rt.sizeDelta = new Vector2(w, h); 352 rt.anchoredPosition = pos; 353 go.AddComponent<Image>().color = color; 354 return go; 355 } 356 357 static Font BuiltinFont() 358 { 359 Font f = Resources.GetBuiltinResource<Font>("LegacyRuntime.ttf"); 360 if (f == null) f = Resources.GetBuiltinResource<Font>("Arial.ttf"); 361 return f; 362 } 363} 364 365
Testing on my Meta Quest 2
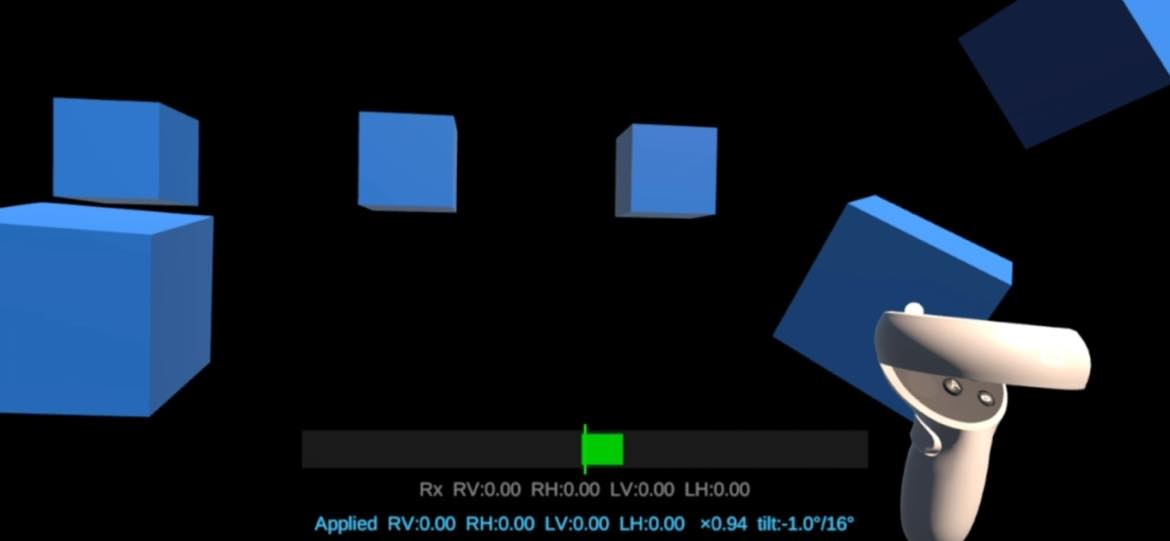
I ran the app on my Quest 2 headset — the black and white passthrough background works in the headset but doesn't appear in the cast view. The spirit level HUD and cube interactions worked correctly